嵌入式Web服务器事先,控制开发板硬件(流程概述)
·
嵌入式 Web 控制硬件:Boa + CGI + JSON-RPC 完整实现
一、系统架构
开发板(i.MX6ULL)运行:
-
Boa Web 服务器:提供静态页面和 CGI 支持。
-
RPC 服务端(常驻后台):基于 JSON‑RPC 接收调用,通过 Modbus 控制 LED 等硬件。
-
CGI 程序:被 Boa 调用,作为中间层连接前端与 RPC 服务端。
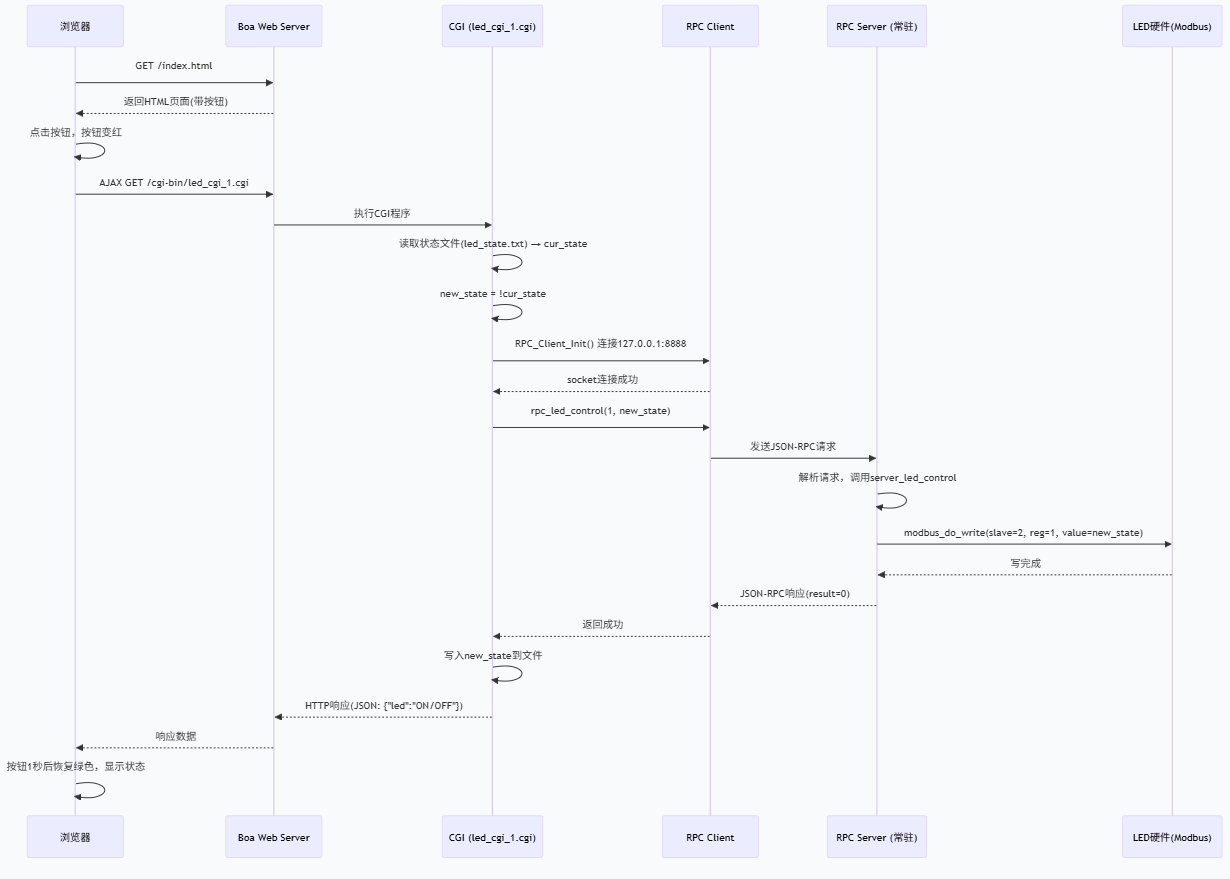
用户通过浏览器访问开发板 IP → 点击按钮 → 异步 CGI 请求 → RPC 控制硬件 → 返回状态 → 页面无刷新,按钮变色。
二、配置文件与代码
1. Boa 配置文件 /boa/boa.conf
text
Port 80 User 0 Group 0 ErrorLog /boa/log/error_log DocumentRoot /boa/www UserDir public_html DirectoryIndex index.html DirectoryMaker /boa/boa_indexer KeepAliveMax 1000 KeepAliveTimeout 10 MimeTypes /boa/mime.types DefaultType text/plain CGIPath /bin:/usr/bin:/usr/local/bin Alias /doc /usr/doc ScriptAlias /cgi-bin/ /boa/cgi-bin/
2. 前端页面 /boa/www/index.html
html
<!DOCTYPE html>
<html>
<head>
<meta charset="UTF-8">
<title>嵌入式硬件控制</title>
<style>
button {
padding: 10px 20px;
font-size: 16px;
cursor: pointer;
background-color: #4CAF50;
color: white;
border: none;
border-radius: 5px;
}
button.red {
background-color: #f44336;
}
</style>
</head>
<body>
<h3>LED 远程控制</h3>
<button id="myBtn">驱动硬件</button>
<p id="status"></p>
<script>
const btn = document.getElementById('myBtn');
const statusP = document.getElementById('status');
btn.onclick = function() {
this.classList.add('red');
fetch('/cgi-bin/led_cgi_1.cgi')
.then(response => response.json())
.then(data => {
console.log('CGI返回:', data);
statusP.innerText = 'LED 状态: ' + data.led;
setTimeout(() => {
btn.classList.remove('red');
}, 1000);
})
.catch(err => {
console.error('请求失败:', err);
btn.style.backgroundColor = 'orange';
statusP.innerText = '请求失败';
});
};
</script>
</body>
</html>
3. CGI 程序 /boa/cgi-bin/led_cgi_1.cgi
c
#include <stdio.h>
#include <stdlib.h>
#include "rpc_client.h"
#define PATH "/tmp/led_state.txt"
int main()
{
int cur_stat = 0;
FILE *fp = fopen(PATH, "r");
if (fp) {
fscanf(fp, "%d", &cur_stat);
fclose(fp);
}
int new_stat = cur_stat ? 0 : 1;
if (RPC_Client_Init() < 0) {
printf("Content-Type: text/plain\n\nERROR: RPC init failed");
return 1;
}
if (rpc_led_control(1, new_stat) < 0) {
printf("Content-Type: text/plain\n\nERROR: rpc led control failed");
return 1;
}
fp = fopen(PATH, "w");
if (fp) {
fprintf(fp, "%d", new_stat);
fclose(fp);
}
printf("Content-Type: application/json\n\n");
printf("{\"led\":\"%s\"}", new_stat ? "ON" : "OFF");
return 0;
}
4. RPC 客户端 (rpc_client.c 核心)
c
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <errno.h>
#include "cJSON.h"
#include "rpc.h"
#define PORT 8888
static int g_SocketClient;
int RPC_Client_Init(void)
{
int sock = socket(AF_INET, SOCK_STREAM, 0);
if (sock < 0) return -1;
struct sockaddr_in addr;
addr.sin_family = AF_INET;
addr.sin_port = htons(PORT);
addr.sin_addr.s_addr = inet_addr("127.0.0.1");
if (connect(sock, (struct sockaddr*)&addr, sizeof(addr)) < 0) {
close(sock);
return -1;
}
g_SocketClient = sock;
return sock;
}
int rpc_led_control(int num, int status)
{
char buf[200];
sprintf(buf, "{\"method\":\"led_control\",\"params\":[%d,%d],\"id\":\"2\"}", num, status);
send(g_SocketClient, buf, strlen(buf), 0);
int len = read(g_SocketClient, buf, sizeof(buf)-1);
if (len <= 0) return -1;
buf[len] = 0;
cJSON *root = cJSON_Parse(buf);
cJSON *result = cJSON_GetObjectItem(root, "result");
int ret = result ? result->valueint : -1;
cJSON_Delete(root);
return ret;
}
5. RPC 服务端 (rpc_server.c 核心)
c
#include <jsonrpc-c.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include "rpc.h"
#include "modbus.h" // 包含 modbus_do_write 等
#define PORT 8888
static struct jrpc_server my_server;
static int serial_fd;
cJSON * server_led_control(jrpc_context *ctx, cJSON *params, cJSON *id)
{
cJSON *num = cJSON_GetArrayItem(params, 0);
cJSON *status = cJSON_GetArrayItem(params, 1);
modbus_do_write(serial_fd, 2, num->valueint, status->valueint);
return cJSON_CreateNumber(0);
}
int main()
{
// 初始化串口、Modbus RS485 等
serial_fd = open_serial("/dev/ttymxc2");
set_opt(serial_fd, 115200, 8, 'N', 1);
// ... 其他初始化
jrpc_server_init(&my_server, PORT);
jrpc_register_procedure(&my_server, server_led_control, "led_control", NULL);
// 可注册更多方法如 dht11_read, EEPROM_write 等
jrpc_server_run(&my_server);
jrpc_server_destroy(&my_server);
return 0;
}
三、运行步骤
-
编译 RPC 服务端,放到开发板并后台运行
bash
./rpc_server &
-
编译 CGI 程序(交叉编译)
bash
arm-buildroot-gcc -o led_cgi_1.cgi led_cgi_1.c rpc_client.c cJSON.c -lpthread
复制到
/boa/cgi-bin/ -
启动 Boa Web 服务器
bash
boa
-
浏览器访问
http://开发板IP,点击按钮即可控制 LED,页面无刷新,按钮变红并恢复,显示当前 LED 状态。
四、注意事项
-
状态文件
/tmp/led_state.txt在重启后会丢失(tmpfs),如需持久化可改为/root/led_state.txt等。 -
RPC 服务端和 CGI 程序编译时需链接
cjson和jsonrpc-c库。 -
确保 CGI 程序有可执行权限:
chmod +x /boa/cgi-bin/led_cgi_1.cgi -
如果使用
fetch请求,浏览器可能因同源策略限制,但开发板上访问同 IP 和端口,不存在跨域问题。

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐
 13
13 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)