linux线程
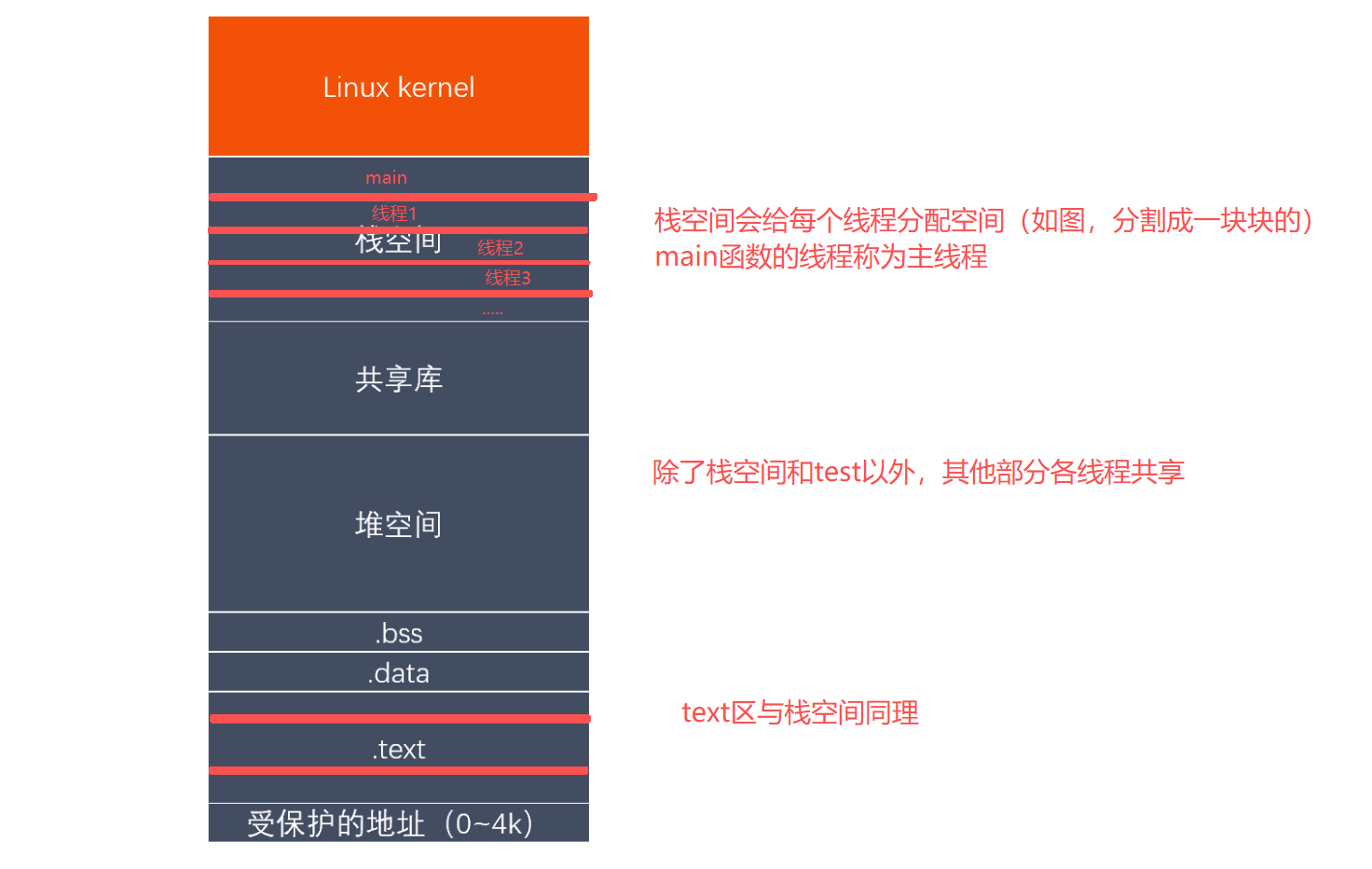
与进程(process)类似,线程(thread)是允许应用程序并发执行多个任务的一种机制。一个进程可以包含多个线程。同一个程序中的所有线程均会独立执行相同程序,且共享同一份全局内存区域,其中包括初始化数据段、未初始化数据段,以及堆内存段。(传统意义上的 UNIX 进程只是多线程程序的一个特例,该进程只包含一个线程)进程是 CPU 分配资源的最小单位,线程是操作系统调度执行的最小单位。线程是轻量级
1.概念
简介
- 与进程(process)类似,线程(thread)是允许应用程序并发执行多个任务的一种机制。一个进程可以包含多个线程。同一个程序中的所有线程均会独立执行相同程序,且共享同一份全局内存区域,其中包括初始化数据段、未初始化数据段,以及堆内存段。(传统意义上的 UNIX 进程只是多线程程序的一个特例,该进程只包含一个线程)
- 进程是 CPU 分配资源的最小单位,线程是操作系统调度执行的最小单位。
- 线程是轻量级的进程(LWP:Light Weight Process),在 Linux 环境下线程的本质仍是进程。
- 查看指定进程的 LWP 号:ps –Lf pid
进程线程区别
- 进程间的信息难以共享。由于除去只读代码段外,父子进程并未共享内存,因此必须采用一些进程间通信方式,在进程间进行信息交换。
- 调用 fork() 来创建进程的代价相对较高,即便利用写时复制技术,仍然需要复制诸如内存页表和文件描述符表之类的多种进程属性,这意味着 fork() 调用在时间上的开销依然不菲。
- 线程之间能够方便、快速地共享信息。只需将数据复制到共享(全局或堆)变量中即可。
- 创建线程比创建进程通常要快 10 倍甚至更多。线程间是共享虚拟地址空间的,无需采用写时复制来复制内存,也无需复制页表。(如下图)
线程之间共享和非共享资源
共享资源
- 进程 ID 和父进程 ID
- 进程组 ID 和会话 ID
- 用户 ID 和 用户组 ID
- 文件描述符表
- 信号处置
- 文件系统的相关信息:文件权限掩码(umask)、当前工作目录
- 虚拟地址空间(除栈、.text)
非共享资源
- 线程 ID
- 信号掩码
- 线程特有数据
- error 变量(每个线程独立维护,之前讲的error是全局变量)
- 实时调度策略和优先级
- 栈,本地变量和函数的调用链接信息
NPTL*
当 Linux 最初开发时,在内核中并不能真正支持线程。但是它的确可以通过 clone() 系统调用将进程作为可调度的实体。这个调用创建了调用进程(calling process)的一个拷贝,这个拷贝与调用进程共享相同的地址空间。
LinuxThreads 项目使用这个调用来完成在用户空间模拟对线程的支持。不幸的是,这种方法有一些缺点,尤其是在信号处理、调度和进程间同步等方面都存在问题。另外,这个线程模型也不符合 POSIX 的要改进 LinuxThreads,需要内核的支持,并且重写线程库。有两个相互竞争的项目开始来满足这些要求。一个包括 IBM 的开发人员的团队开展了 NGPT(Next-Generation POSIX Threads)项目。同时,Red Hat 的一些开发人员开展了 NPTL 项目。NGPT 在 2003 年中期被放弃了,把这个领域完全留给了NPTL。
NPTL,或称为 Native POSIX Thread Library,是 Linux 线程的一个新实现,它克服了LinuxThreads的缺点,同时也符合 POSIX 的需求。与 LinuxThreads 相比,它在性能和稳定性方面都提供了重大的改进。
查看当前 pthread 库版本:getconf GNU_LIBPTHREAD_VERSION
2. 线程操作函数
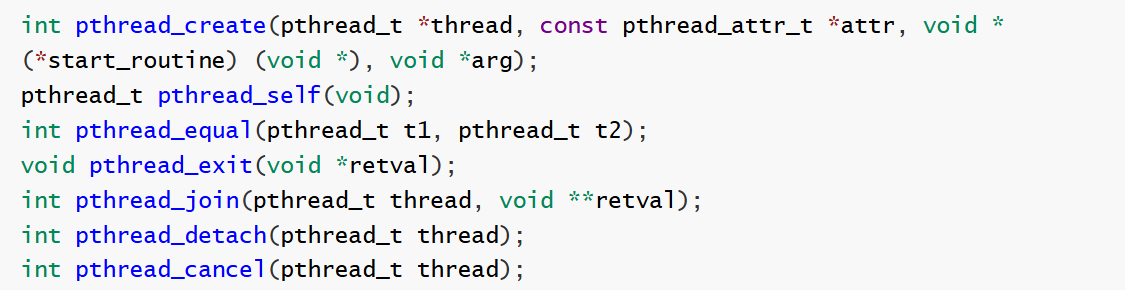
pthread_create
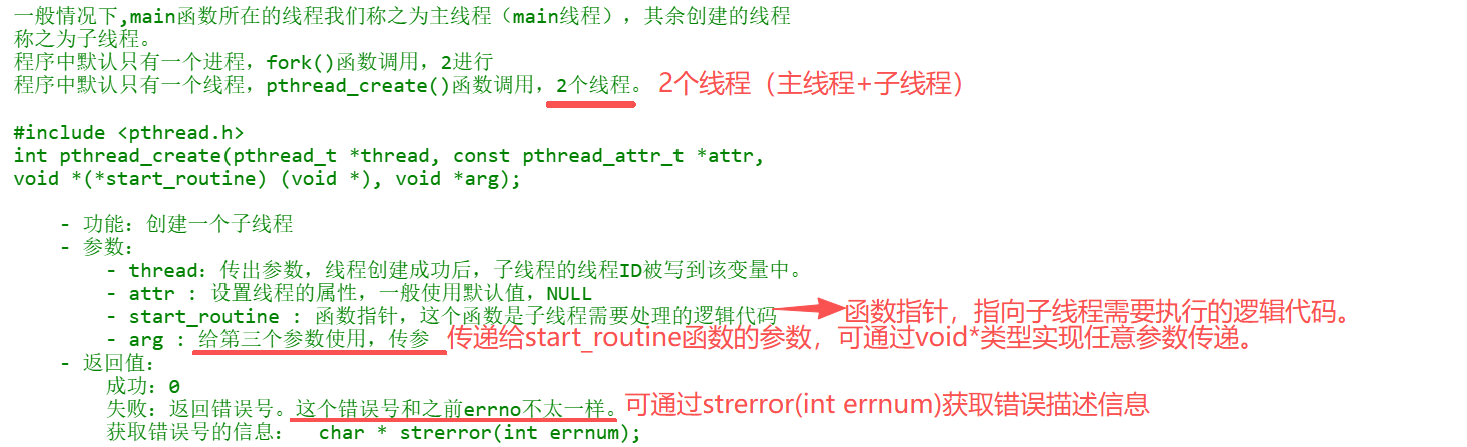
创建一个子线程
#include <stdio.h>
#include <pthread.h>
#include <string.h>
#include <unistd.h>
void * callback(void * arg) {
printf("child thread...\n");
printf("arg value: %d\n", *(int *)arg);
return NULL;
}
int main() {
pthread_t tid;
int num = 10;
// 创建一个子线程
int ret = pthread_create(&tid, NULL, callback, (void *)&num);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error : %s\n", errstr);
}
for(int i = 0; i < 5; i++) {
printf("%d\n", i);
}
sleep(1);
return 0; // exit(0);
}编译注意事项:需要添加-pthread或-lpthread编译选项链接线程库。

原因:线程不是我们标准的系统库啊,它是第三方的库,那么既然是第三方的库的话,我们需要?通过-l去指定它的这个库的名称。

pthread_exit
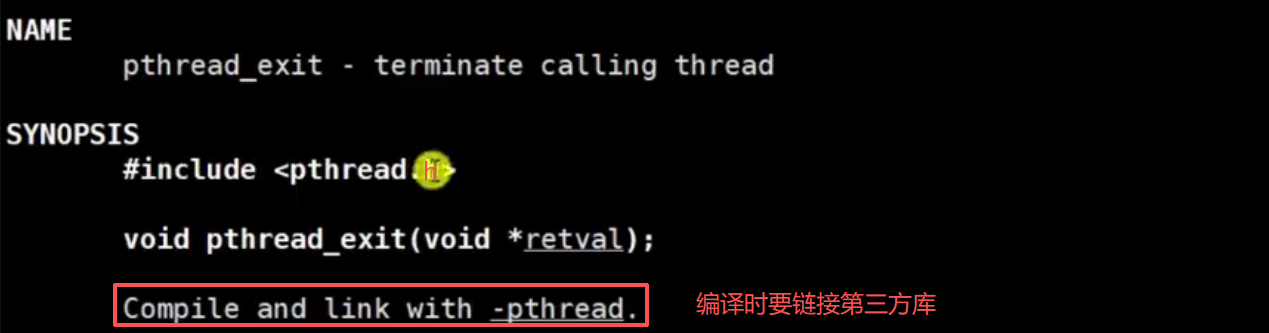

- 函数原型:void pthread_exit(void *retval);
- 功能特性:
- 用于终止调用该函数的线程
- 在哪个线程中调用就终止哪个线程
- 主线程退出时不会影响其他正在运行的线程
- 参数说明:
- retval:需要传递指针作为返回值,可在pthread_join()中获取
#include <stdio.h>
#include <pthread.h>
#include <string.h>
void * callback(void * arg) {
printf("child thread id : %ld\n", pthread_self());
return NULL; // 相当于pthread_exit(NULL);
}
int main() {
// 创建一个子线程
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error : %s\n", errstr);
}
// 主线程
for(int i = 0; i < 5; i++) {
printf("%d\n", i);
}
printf("tid : %ld, main thread id : %ld\n", tid ,pthread_self());
// 让主线程退出,当主线程退出时,不会影响其他正常运行的线程。
pthread_exit(NULL);
//线程退出后,后面的代码就不会执行,也不会执行return 0;
printf("main thread exit\n");
return 0; // exit(0);
}执行特点:
- 主线程和子线程会交替执行(可通过增加循环次数观察,结果交替输出,主要看输出时间先后)
- 主线程退出后子线程仍可继续执行
注意事项:
- 主线程调用pthread_exit后其后续代码不会执行
- 使用return在主线程中会终止整个进程
- 编译时需要添加-pthread选项
pthread_self

pthread_equal

功能作用:
- 用于比较两个线程ID是否相等
- 线程安全的标准比较方式,可跨平台使用
实现差异:
- Linux实现: 在Ubuntu系统中查看pthreadtypes.h可见,pthread_t实际定义为unsigned long int
- 其他系统可能实现: 某些操作系统可能使用结构体实现线程ID
使用注意:
- 不能直接使用==比较的原因:
- 结构体实现时比较的是内存地址而非内容
- 保证代码可移植性
- 虽然Linux下可用==比较,但推荐使用标准API
典型应用场景:
- 需要精确判断线程身份的场合
- 跨平台开发时必备
pthread_join
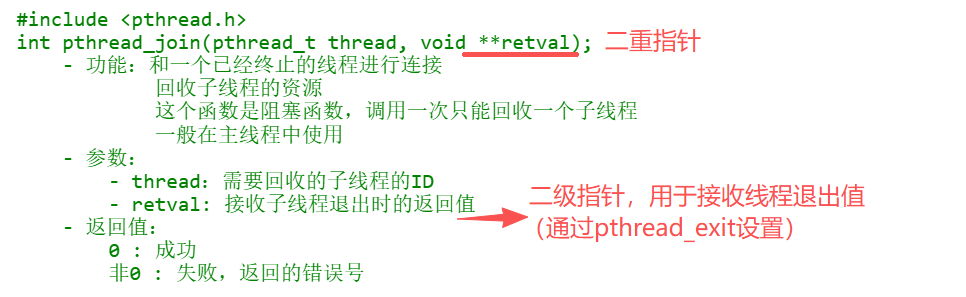
#include <stdio.h>
#include <pthread.h>
#include <string.h>
#include <unistd.h>
int value = 10;
void * callback(void * arg) {
printf("child thread id : %ld\n", pthread_self());
// sleep(3);
// return NULL;
// int value = 10; // 局部变量
pthread_exit((void *)&value); // return (void *)&value;二级指针,会传给pthread_join()函数
}
int main() {
// 创建一个子线程
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error : %s\n", errstr);
}
// 主线程
for(int i = 0; i < 5; i++) {
printf("%d\n", i);
}
printf("tid : %ld, main thread id : %ld\n", tid ,pthread_self());
// 主线程调用pthread_join()回收子线程的资源
int * thread_retval;
ret = pthread_join(tid, (void **)&thread_retval);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error : %s\n", errstr);
}
printf("exit data : %d\n", *thread_retval);
printf("回收子线程资源成功!\n");
// 让主线程退出,当主线程退出时,不会影响其他正常运行的线程。
pthread_exit(NULL);
return 0;
}pthread_detach
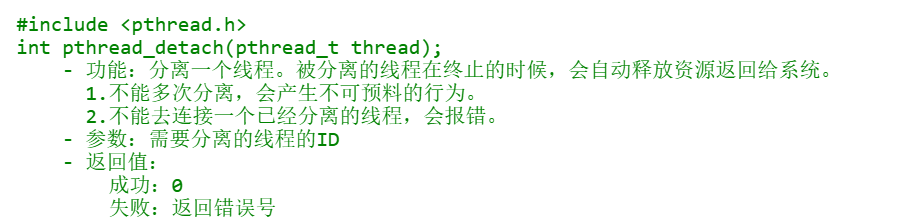
detach的线程不需要主线程回收,其他线程也不能对它进行回收
/*
#include <pthread.h>
int pthread_detach(pthread_t thread);
- 功能:分离一个线程。被分离的线程在终止的时候,会自动释放资源返回给系统。
1.不能多次分离,会产生不可预料的行为。
2.不能去连接一个已经分离的线程,会报错。
- 参数:需要分离的线程的ID
- 返回值:
成功:0
失败:返回错误号
*/
#include <stdio.h>
#include <pthread.h>
#include <string.h>
#include <unistd.h>
void * callback(void * arg) {
printf("chid thread id : %ld\n", pthread_self());
return NULL;
}
int main() {
// 创建一个子线程
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error1 : %s\n", errstr);
}
// 输出主线程和子线程的id
printf("tid : %ld, main thread id : %ld\n", tid, pthread_self());
// 设置子线程分离,子线程分离后,子线程结束时对应的资源就不需要主线程释放
ret = pthread_detach(tid);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error2 : %s\n", errstr);
}
// 设置分离后,对分离的子线程进行连接 pthread_join()
// ret = pthread_join(tid, NULL);
// if(ret != 0) {
// char * errstr = strerror(ret);
// printf("error3 : %s\n", errstr);
// }
pthread_exit(NULL);
return 0;
}pthread_cancel
1)功能与基本用法
- 函数声明: int pthread_cancel(pthread_t thread)
- 核心功能: 向指定线程发送取消请求,使其终止执行
- 典型应用场景:
- 杀毒软件中取消垃圾清理任务
- 用户主动中断长时间运行的后台任务
- 调用时机: 当需要中途终止某个正在执行任务的线程时使用
2)取消机制详解
- 非即时性: 调用后不会立即终止线程,而是设置取消标志
- 取消条件:
- 线程必须处于可取消状态(cancelability state)
- 线程必须设置允许取消的类型(cancelability type)
- 属性控制: 通过pthread_attr_t设置线程属性时,可以控制这两个参数
3)取消点概念
- 定义: 线程执行过程中能够响应取消请求的特定位置
- 常见取消点:
- 系统调用函数(如accept, close, connect等)
- I/O操作函数
- 特定同步函数
- 实现原理:
- 当线程执行到取消点时检查取消标志
- 若标志被设置则执行线程终止流程
- 近似理解: 可视为用户态到内核态的切换点

#include <stdio.h>
#include <pthread.h>
#include <string.h>
#include <unistd.h>
void * callback(void * arg) {
printf("chid thread id : %ld\n", pthread_self());
for(int i = 0; i < 5; i++) {
printf("child : %d\n", i);
}
return NULL;
}
int main() {
// 创建一个子线程
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error1 : %s\n", errstr);
}
// 取消线程
pthread_cancel(tid);
for(int i = 0; i < 5; i++) {
printf("%d\n", i);
}
// 输出主线程和子线程的id
printf("tid : %ld, main thread id : %ld\n", tid, pthread_self());
pthread_exit(NULL);
return 0;
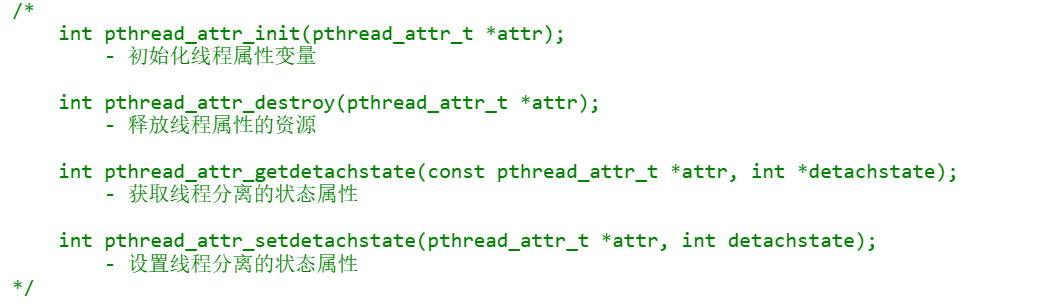
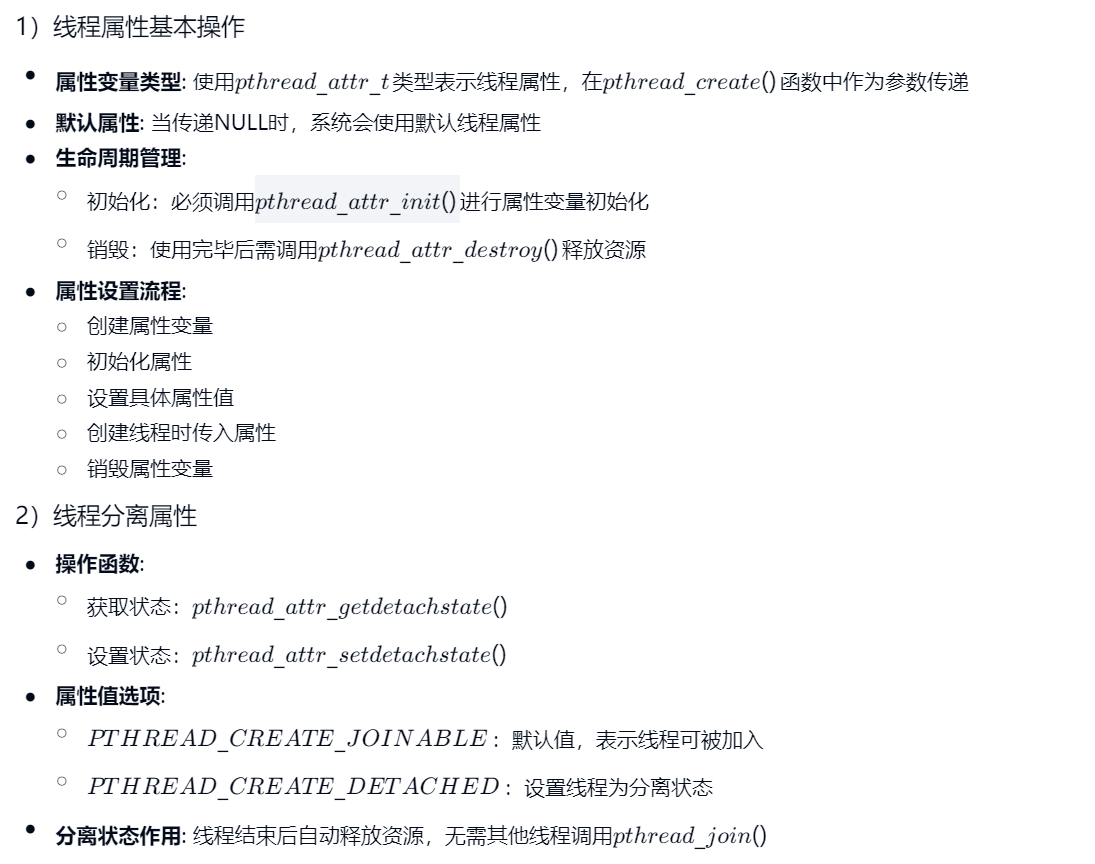
}3.线程属性相关:
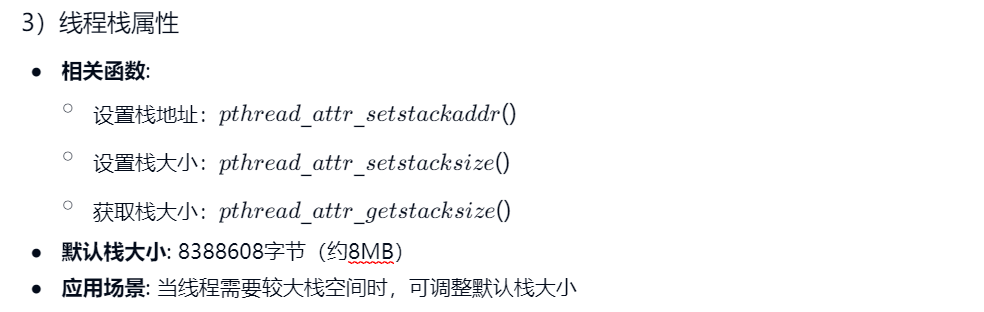
/*
int pthread_attr_init(pthread_attr_t *attr);
- 初始化线程属性变量
int pthread_attr_destroy(pthread_attr_t *attr);
- 释放线程属性的资源
int pthread_attr_getdetachstate(const pthread_attr_t *attr, int *detachstate);
- 获取线程分离的状态属性
int pthread_attr_setdetachstate(pthread_attr_t *attr, int detachstate);
- 设置线程分离的状态属性
*/
#include <stdio.h>
#include <pthread.h>
#include <string.h>
#include <unistd.h>
void * callback(void * arg) {
printf("chid thread id : %ld\n", pthread_self());
return NULL;
}
int main() {
// 创建一个线程属性变量
pthread_attr_t attr;
// 初始化属性变量
pthread_attr_init(&attr);
// 设置属性
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED);
// 创建一个子线程
pthread_t tid;
int ret = pthread_create(&tid, &attr, callback, NULL);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error1 : %s\n", errstr);
}
// 获取线程的栈的大小
size_t size;
pthread_attr_getstacksize(&attr, &size);
printf("thread stack size : %ld\n", size);
// 输出主线程和子线程的id
printf("tid : %ld, main thread id : %ld\n", tid, pthread_self());
// 释放线程属性资源
pthread_attr_destroy(&attr);
pthread_exit(NULL);
return 0;
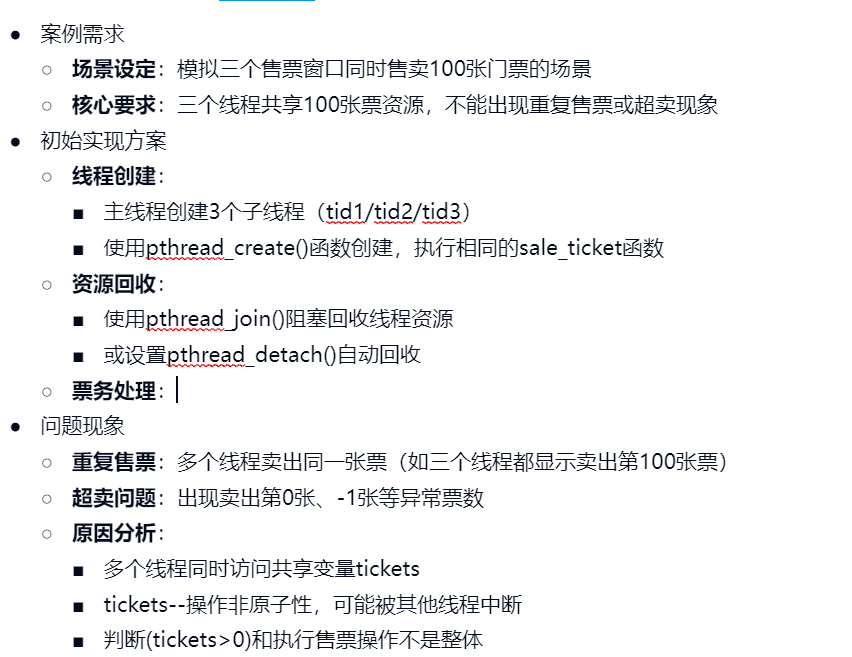
}举例:卖票
/*
使用多线程实现买票的案例。
有3个窗口,一共是100张票。
*/
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 全局变量,所有的线程都共享这一份资源。
int tickets = 100;
void * sellticket(void * arg) {
// 卖票
while(tickets > 0) {
usleep(6000);
printf("%ld 正在卖第 %d 张门票\n", pthread_self(), tickets);
tickets--;
}
return NULL;
}
int main() {
// 创建3个子线程
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, sellticket, NULL);
pthread_create(&tid2, NULL, sellticket, NULL);
pthread_create(&tid3, NULL, sellticket, NULL);
// 回收子线程的资源,阻塞
// pthread_join(tid1, NULL);
// pthread_join(tid2, NULL);
// pthread_join(tid3, NULL);
// 设置线程分离。
pthread_detach(tid1);
pthread_detach(tid2);
pthread_detach(tid3);
pthread_exit(NULL); // 退出主线程
return 0;
}
运行结果:
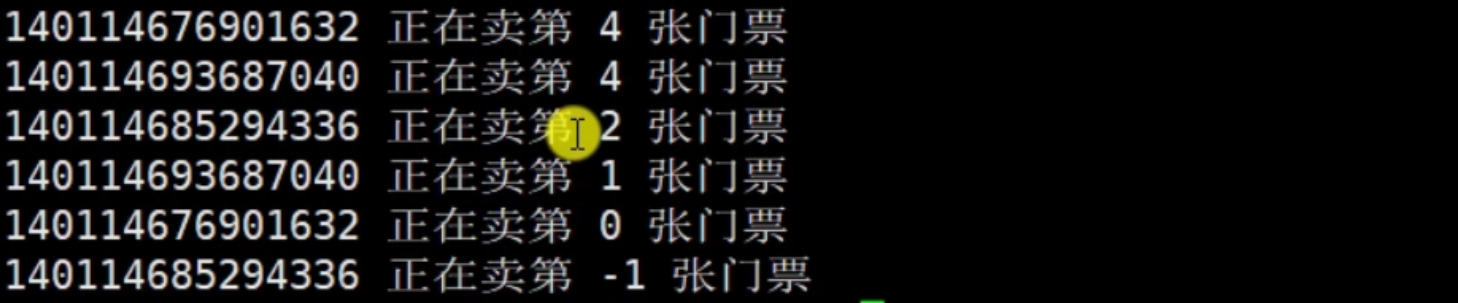
问题原因
1.重复售卖:
线程A判断tickets=1>0,进入循环但未执行减操作;线程B抢占CPU,同样判断tickets=1>0,并输出相同的数字。
2.超卖问题:
线程A卖出第1张票,然后tickets--,此时tickets=0;但是在线程A执行tickets--之前,线程B也进入循环,在线程A执行tickets--之后,线程B继续执行,卖出第0张票,tickets=-1。
4.线程同步
4.1 简介
线程的主要优势在于,能够通过全局变量来共享信息。不过,这种便捷的共享是有代价的:必须确保多个线程不会同时修改同一变量,或者某一线程不会读取正在由其他线程修改的变量。
临界区是指访问某一共享资源的代码片段,并且这段代码的执行应为原子操作,也就是同时访问同一共享资源的其他线程不应终端该片段的执行。
线程同步:即当有一个线程在对内存进行操作时,其他线程都不可以对这个内存地址进行操作,直到该线程完成操作,其他线程才能对该内存地址进行操作,而其他线程则处于等待状态。
4.2 互斥量
为避免线程更新共享变量时出现问题,可以使用互斥量(mutex是mutual exclusion的缩写)来确保同时仅有一个线程可以访问某项共享资源。可以使用互斥量来保证对任意共享资源的原子访问。
互斥量有两种状态:已锁定(locked)和未锁定(unlocked)。任何时候,至多只有一个线程可以锁定该互斥量。试图对已经锁定的某一互斥量再次加锁,将可能阻塞线程或者报错失败,具体取决于加锁时使用的方法。
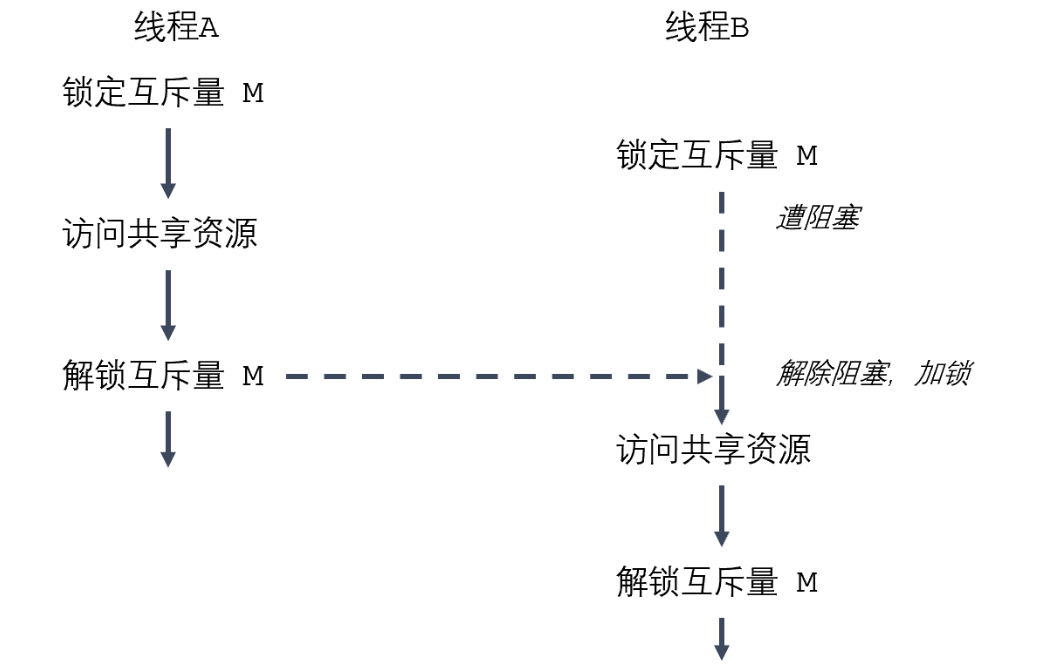
一旦线程锁定互斥量,随即成为该互斥量的所有者,只有所有者才能给互斥量解锁。一般情况下,对每一共享资源(可能由多个相关变量组成)会使用不同的互斥量,每一线程在访问同一资源时将采用如下协议:
- 针对共享资源锁定互斥量
- 访问共享资源
- 对互斥量解锁
如果多个线程试图执行这一块代码(一个临界区),事实上只有一个线程能够持有该互斥量(其他线程将遭到阻塞),即同时只有一个线程能够进入这段代码区域,如下图所示:
4.2.1 互斥量类型
/*
互斥量的类型 pthread_mutex_t
int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr);
- 初始化互斥量
- 参数 :
- mutex : 需要初始化的互斥量变量
- attr : 互斥量相关的属性,NULL
- restrict : C语言的修饰符,被修饰的指针,不能由另外的一个指针进行操作。
pthread_mutex_t *restrict mutex = xxx;
pthread_mutex_t * mutex1 = mutex;
int pthread_mutex_destroy(pthread_mutex_t *mutex);
- 释放互斥量的资源
int pthread_mutex_lock(pthread_mutex_t *mutex);
- 加锁,阻塞的,如果有一个线程加锁了,那么其他的线程只能阻塞等待
int pthread_mutex_trylock(pthread_mutex_t *mutex);
- 尝试加锁,如果加锁失败,不会阻塞,会直接返回。
int pthread_mutex_unlock(pthread_mutex_t *mutex);
- 解锁
*/
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 全局变量,所有的线程都共享这一份资源。
int tickets = 1000;
// 创建一个互斥量
pthread_mutex_t mutex;
void * sellticket(void * arg) {
// 卖票
while(1) {
// 加锁
pthread_mutex_lock(&mutex);
if(tickets > 0) {
usleep(6000);
printf("%ld 正在卖第 %d 张门票\n", pthread_self(), tickets);
tickets--;
}else {
// 解锁
pthread_mutex_unlock(&mutex);
break;
}
// 解锁
pthread_mutex_unlock(&mutex);
}
return NULL;
}
int main() {
// 初始化互斥量
pthread_mutex_init(&mutex, NULL);
// 创建3个子线程
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, sellticket, NULL);
pthread_create(&tid2, NULL, sellticket, NULL);
pthread_create(&tid3, NULL, sellticket, NULL);
// 回收子线程的资源,阻塞
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_join(tid3, NULL);
pthread_exit(NULL); // 退出主线程
// 释放互斥量资源
pthread_mutex_destroy(&mutex);
return 0;
}4.3 死锁
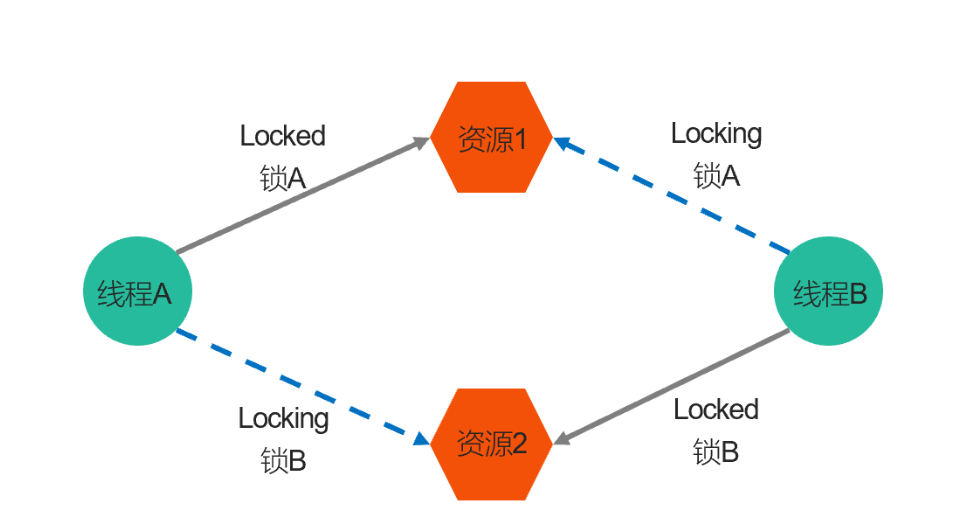
有时,一个线程需要同时访问两个或更多不同的共享资源,而每个资源又都由不同的互斥量管理。当超过一个线程加锁同一组互斥量时,就有可能发生死锁。
两个或两个以上的进程在执行过程中,因争夺共享资源而造成的一种互相等待的现象,若无外力作用,它们都将无法推进下去。此时称系统处于死锁状态或系统产生了死锁。
死锁的几种场景:
- 忘记释放锁
- 重复加锁(对同一个锁重复上锁)

- 多线程多锁,抢占锁资源(如下图所示)
//死锁举例
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 创建2个互斥量
pthread_mutex_t mutex1, mutex2;
void * workA(void * arg) {
pthread_mutex_lock(&mutex1);
sleep(1);
pthread_mutex_lock(&mutex2);
printf("workA....\n");
pthread_mutex_unlock(&mutex2);
pthread_mutex_unlock(&mutex1);
return NULL;
}
void * workB(void * arg) {
pthread_mutex_lock(&mutex2);
sleep(1);
pthread_mutex_lock(&mutex1);
printf("workB....\n");
pthread_mutex_unlock(&mutex1);
pthread_mutex_unlock(&mutex2);
return NULL;
}
int main() {
// 初始化互斥量
pthread_mutex_init(&mutex1, NULL);
pthread_mutex_init(&mutex2, NULL);
// 创建2个子线程
pthread_t tid1, tid2;
pthread_create(&tid1, NULL, workA, NULL);
pthread_create(&tid2, NULL, workB, NULL);
// 回收子线程资源
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
// 释放互斥量资源
pthread_mutex_destroy(&mutex1);
pthread_mutex_destroy(&mutex2);
return 0;
}4.4 读写锁
当有一个线程已经持有互斥锁时,互斥锁将所有试图进入临界区的线程都阻塞住。但是考虑一种情形,当前持有互斥锁的线程只是要读访问共享资源,而同时有其它几个线程也想读取这个共享资源,但是由于互斥锁的排它性,所有其它线程都无法获取锁,也就无法读访问共享资源了,但是实际上多个线程同时读访问共享资源并不会导致问题。
在对数据的读写操作中,更多的是读操作,写操作较少,例如对数据库数据的读写应用。为了满足当前能够允许多个读出,但只允许一个写入的需求,线程提供了读写锁来实现。
读写锁的特点:
- 如果有其它线程读数据,则允许其它线程执行读操作,但不允许写操作。
- 如果有其它线程写数据,则其它线程都不允许读、写操作。
- 写是独占的,写的优先级高。
读写锁类型

/*
读写锁的类型 pthread_rwlock_t
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock, const pthread_rwlockattr_t *restrict attr);
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);
案例:8个线程操作同一个全局变量。
3个线程不定时写这个全局变量,5个线程不定时的读这个全局变量
*/
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 创建一个共享数据
int num = 1;
// pthread_mutex_t mutex;
pthread_rwlock_t rwlock;
void * writeNum(void * arg) {
while(1) {
pthread_rwlock_wrlock(&rwlock);
num++;
printf("++write, tid : %ld, num : %d\n", pthread_self(), num);
pthread_rwlock_unlock(&rwlock);
usleep(100);
}
return NULL;
}
void * readNum(void * arg) {
while(1) {
pthread_rwlock_rdlock(&rwlock);
printf("===read, tid : %ld, num : %d\n", pthread_self(), num);
pthread_rwlock_unlock(&rwlock);
usleep(100);
}
return NULL;
}
int main() {
pthread_rwlock_init(&rwlock, NULL);
// 创建3个写线程,5个读线程
pthread_t wtids[3], rtids[5];
for(int i = 0; i < 3; i++) {
pthread_create(&wtids[i], NULL, writeNum, NULL);
}
for(int i = 0; i < 5; i++) {
pthread_create(&rtids[i], NULL, readNum, NULL);
}
// 设置线程分离
for(int i = 0; i < 3; i++) {
pthread_detach(wtids[i]);
}
for(int i = 0; i < 5; i++) {
pthread_detach(rtids[i]);
}
getchar();
pthread_rwlock_destroy(&rwlock);
pthread_exit(NULL);
return 0;
}主线程控制:通过pthread_exit(NULL)退出主线程而不影响子线程运行,假如没有的话,运行到return 0的话,会直接结束未完成的子线程。
5.生产者消费者模型
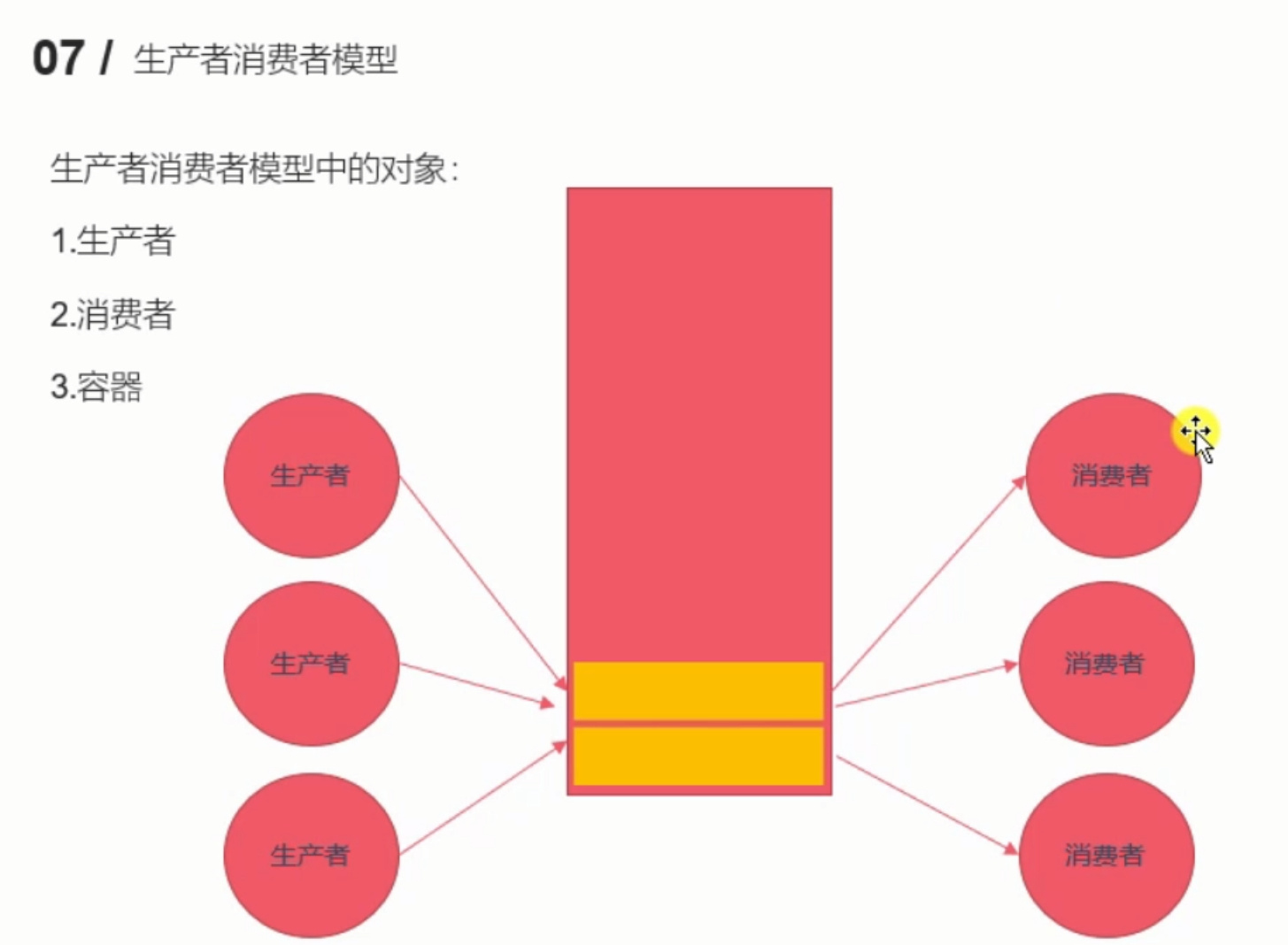
核心角色:包含三个主要对象
- 生产者:负责生产商品/数据
- 消费者:负责消费商品/数据
- 容器:存储生产者创建的商品/数据
生活实例:以包子铺为例
- 生产者:制作包子的厨师
- 容器:存放包子的蒸笼
- 消费者:购买包子的顾客
容量控制:
- 生产者需在容器满时停止生产
- 消费者需在容器空时停止消费
通信机制:
- 通过条件变量实现线程间通知
- 生产者通知消费者消费
- 消费者通知生产者生产
线程安全:
- 必须对共享容器进行同步保护
- 典型解决方案:互斥锁+条件变量组合
/*
生产者消费者模型(粗略的版本)
*/
#include <stdio.h>
#include <pthread.h>
#include <stdlib.h>
#include <unistd.h>
// 创建一个互斥量
pthread_mutex_t mutex;
struct Node{
int num;
struct Node *next;
};
// 头结点
struct Node * head = NULL;
void * producer(void * arg) {
// 不断的创建新的节点,添加到链表中
while(1) {
pthread_mutex_lock(&mutex);
struct Node * newNode = (struct Node *)malloc(sizeof(struct Node));
newNode->next = head;
head = newNode;
newNode->num = rand() % 1000;
printf("add node, num : %d, tid : %ld\n", newNode->num, pthread_self());
pthread_mutex_unlock(&mutex);
usleep(100);
}
return NULL;
}
void * customer(void * arg) {
while(1) {
pthread_mutex_lock(&mutex);
// 保存头结点的指针
struct Node * tmp = head;
// 判断是否有数据,当链表头节点为空时,访问会导致段错误,必须在使用前判断。
if(head != NULL) {
// 有数据
head = head->next;
printf("del node, num : %d, tid : %ld\n", tmp->num, pthread_self());
free(tmp);
pthread_mutex_unlock(&mutex);
usleep(100);
} else {
// 没有数据
pthread_mutex_unlock(&mutex);
}
}
return NULL;
}
int main() {
pthread_mutex_init(&mutex, NULL);
// 创建5个生产者线程,和5个消费者线程
pthread_t ptids[5], ctids[5];
for(int i = 0; i < 5; i++) {
pthread_create(&ptids[i], NULL, producer, NULL);
pthread_create(&ctids[i], NULL, customer, NULL);
}
for(int i = 0; i < 5; i++) {
pthread_detach(ptids[i]);
pthread_detach(ctids[i]);
}
while(1) {
sleep(10);
}
pthread_mutex_destroy(&mutex);
pthread_exit(NULL);
return 0;
}以上代码存在无限循环,浪费资源的问题。在无数据时直接释放锁虽然能避免死锁,但会导致CPU空转浪费资源(如示例中每秒百万次无效判断)。
基础方案缺陷:
- 直接释放锁后继续循环检查,虽然避免死锁但效率低下
- 生产者无法感知消费者等待状态,缺乏协作机制
理想方案特征:
- 消费者发现无数据时应阻塞等待
- 生产者添加数据后主动通知消费者
- 需要引入线程间通信机制
6.条件变量
[Linux]条件变量:实现线程同步(什么是条件变量、为什么需要条件变量,怎么使用条件变量(接口)、例子,代码演示(生产者消费者模型))-CSDN博客
6.1 类型
核心函数:
- pthread_cond_init():初始化条件变量
- pthread_cond_destroy():销毁条件变量
- pthread_cond_wait():线程阻塞等待条件
- pthread_cond_timedwait():带超时的条件等待
- pthread_cond_signal():唤醒单个等待线程
- pthread_cond_broadcast():唤醒所有等待线程

wait函数特性:
- 阻塞性质:调用后线程会进入阻塞状态
- 参数要求:需要同时传入条件变量和互斥锁
- 内部机制:会自动释放互斥锁并在唤醒时重新获取
timedwait函数:
- 超时控制:通过timespec结构指定最长等待时间
- 超时行为:时间结束后自动解除阻塞
唤醒方式:
- signal:唤醒单个等待线程(随机选择)
- broadcast:唤醒所有等待线程
改进后的代码
/*
条件变量的类型 pthread_cond_t
int pthread_cond_init(pthread_cond_t *restrict cond, const pthread_condattr_t *restrict attr);
int pthread_cond_destroy(pthread_cond_t *cond);
int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex);
- 等待,调用了该函数,线程会阻塞。
int pthread_cond_timedwait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex, const struct timespec *restrict abstime);
- 等待多长时间,调用了这个函数,线程会阻塞,直到指定的时间结束。
int pthread_cond_signal(pthread_cond_t *cond);
- 唤醒一个或者多个等待的线程
int pthread_cond_broadcast(pthread_cond_t *cond);
- 唤醒所有的等待的线程
*/
#include <stdio.h>
#include <pthread.h>
#include <stdlib.h>
#include <unistd.h>
// 创建一个互斥量
pthread_mutex_t mutex;
// 创建条件变量
pthread_cond_t cond;
struct Node{
int num;
struct Node *next;
};
// 头结点
struct Node * head = NULL;
void * producer(void * arg) {
// 不断的创建新的节点,添加到链表中
while(1) {
pthread_mutex_lock(&mutex);
struct Node * newNode = (struct Node *)malloc(sizeof(struct Node));
newNode->next = head;
head = newNode;
newNode->num = rand() % 1000;
printf("add node, num : %d, tid : %ld\n", newNode->num, pthread_self());
// 只要生产了一个,就通知消费者消费
pthread_cond_signal(&cond);
pthread_mutex_unlock(&mutex);
usleep(100);
}
return NULL;
}
void * customer(void * arg) {
while(1) {
pthread_mutex_lock(&mutex);
// 保存头结点的指针
struct Node * tmp = head;
// 判断是否有数据
if(head != NULL) {
// 有数据
head = head->next;
printf("del node, num : %d, tid : %ld\n", tmp->num, pthread_self());
free(tmp);
pthread_mutex_unlock(&mutex);
usleep(100);
} else {
// 没有数据,需要等待
// 当这个函数调用阻塞的时候,会对互斥锁进行解锁,当不阻塞的时候,继续向下执行,会重新加锁。
pthread_cond_wait(&cond, &mutex);
//重新获取锁之后,还是要解锁,为了后面再次上锁
pthread_mutex_unlock(&mutex);
}
}
return NULL;
}
int main() {
pthread_mutex_init(&mutex, NULL);
pthread_cond_init(&cond, NULL);
// 创建5个生产者线程,和5个消费者线程
pthread_t ptids[5], ctids[5];
for(int i = 0; i < 5; i++) {
pthread_create(&ptids[i], NULL, producer, NULL);
pthread_create(&ctids[i], NULL, customer, NULL);
}
for(int i = 0; i < 5; i++) {
pthread_detach(ptids[i]);
pthread_detach(ctids[i]);
}
while(1) {
sleep(10);
}
pthread_mutex_destroy(&mutex);
pthread_cond_destroy(&cond);
pthread_exit(NULL);
return 0;
}wait特性:
- 阻塞行为:pthread_cond_wait()是阻塞调用,但会先释放互斥锁
- 自动解锁:进入等待状态时会自动解锁互斥锁,允许其他线程获取锁
- 恢复加锁:当条件满足继续执行时,会自动重新获取互斥锁
死锁预防:
- 关键机制:wait的自动解锁特性避免了消费者持有锁时生产者无法生产的死锁情况
- 执行流程:消费者线程A阻塞等待→自动释放锁→生产者线程B获取锁生产→通知线程A→线程A重新加锁继续执行
7.信号量
Linux快速入门:Linux进程间通信之信号量_哔哩哔哩_bilibili
7.1. 基本概念
本质特征:
- 灯比喻:类似交通信号灯,亮表示资源可用(值为正),灭表示不可用(值为0)
- 非安全性:仅控制线程阻塞,不保证线程安全,需配合互斥锁使用
核心函数:
- 初始化:sem_init(sem_t *sem, int pshared, unsigned int value)
- 阻塞等待:sem_wait(sem_t *sem)(值减1)
- 释放信号:sem_post(sem_t *sem)(值加1)
- 非阻塞尝试:sem_trywait(sem_t *sem)
- 定时等待:sem_timedwait(sem_t *sem, const struct timespec *abs_timeout)
7.2. 工作原理
数值操作:
- 初始化值:如设为5表示初始允许5个线程并发访问
- 递减规则:每次wait调用使值减1,当值为0时新线程阻塞
- 递增规则:post调用使值加1,唤醒等待线程
应用场景:
- 生产者-消费者:生产者post增加资源,消费者wait消耗资源
- 线程池:控制最大并发线程数
注意事项:
- 值范围:必须初始化为非负整数
- 线程安全:需额外使用互斥锁保护共享数据
7.3 函数类型
sem_init
功能:初始化一个未命名的信号量
参数说明:sem_init(sem_t *sem, int pshared, unsigned int value)
- sem:需要传递信号量变量的地址
- pshared:决定信号量的共享范围
- 值为0:在线程间共享(应位于全局变量或堆内存中)
- 非零值:在进程间共享(需位于共享内存区域)
- value:指定信号量的初始值
返回值:
- 成功返回0
- 失败返回-1并设置errno
注意事项:
- 重复初始化已初始化的信号量会导致未定义行为
- 多进程程序较少使用,通常采用多线程方案
- 进程间同步也可通过其他方式实现
sem_destroy
功能:释放信号量占用的资源
注意事项:
- 必须在使用完毕后调用以避免资源泄漏
- 销毁后不应再使用该信号量
sem_wait
功能:对信号量进行加锁操作
工作原理:
- 调用一次会使信号量的值减1
- 如果值大于0,函数立即返回
- 如果值为0,调用线程将阻塞
- 直到信号量值变为大于0
- 或被信号中断
类比说明:
- 类似停车场场景:
- 车位总数对应初始value
- 每停一辆车(sem_wait)车位减1
- 车位为0时新车辆需等待
sem_trywait
功能:尝试对信号量加锁
特点:
- 非阻塞版本sem_wait
- 如果信号量值为0立即返回错误
- 不会使调用线程阻塞
sem_post
功能:对信号量进行解锁操作
工作原理:
- 调用一次会使信号量的值加1
- 如果有线程因sem_wait阻塞,会被唤醒
类比说明:
- 类似停车场场景:
- 每开走一辆车(sem_post)车位加1
- 唤醒等待的车辆可以进入
sem_getvalue
功能:获取信号量的当前值
参数说明:
- 通过指针参数返回当前信号量值
注意事项:
- 在多线程环境下获取的值可能立即失效
- 主要用于调试目的
/*
信号量的类型 sem_t
int sem_init(sem_t *sem, int pshared, unsigned int value);
- 初始化信号量
- 参数:
- sem : 信号量变量的地址
- pshared : 0 用在线程间 ,非0 用在进程间
- value : 信号量中的值
int sem_destroy(sem_t *sem);
- 释放资源
int sem_wait(sem_t *sem);
- 对信号量加锁,调用一次对信号量的值-1,如果值为0,就阻塞
int sem_trywait(sem_t *sem);
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);
int sem_post(sem_t *sem);
- 对信号量解锁,调用一次对信号量的值+1
int sem_getvalue(sem_t *sem, int *sval);
sem_t psem;
sem_t csem;
init(psem, 0, 8);
init(csem, 0, 0);
producer() {
sem_wait(&psem);
sem_post(&csem)
}
customer() {
sem_wait(&csem);
sem_post(&psem)
}
*/
#include <stdio.h>
#include <pthread.h>
#include <stdlib.h>
#include <unistd.h>
#include <semaphore.h>
// 创建一个互斥量
pthread_mutex_t mutex;
// 创建两个信号量
sem_t psem;
sem_t csem;
struct Node{
int num;
struct Node *next;
};
// 头结点
struct Node * head = NULL;
void * producer(void * arg) {
// 不断的创建新的节点,添加到链表中
while(1) {
sem_wait(&psem);
pthread_mutex_lock(&mutex);
struct Node * newNode = (struct Node *)malloc(sizeof(struct Node));
newNode->next = head;
head = newNode;
newNode->num = rand() % 1000;
printf("add node, num : %d, tid : %ld\n", newNode->num, pthread_self());
pthread_mutex_unlock(&mutex);
sem_post(&csem);
}
return NULL;
}
void * customer(void * arg) {
while(1) {
sem_wait(&csem);
pthread_mutex_lock(&mutex);
// 保存头结点的指针
struct Node * tmp = head;
head = head->next;
printf("del node, num : %d, tid : %ld\n", tmp->num, pthread_self());
free(tmp);
pthread_mutex_unlock(&mutex);
sem_post(&psem);
}
return NULL;
}
int main() {
pthread_mutex_init(&mutex, NULL);
sem_init(&psem, 0, 8);
sem_init(&csem, 0, 0);
// 创建5个生产者线程,和5个消费者线程
pthread_t ptids[5], ctids[5];
for(int i = 0; i < 5; i++) {
pthread_create(&ptids[i], NULL, producer, NULL);
pthread_create(&ctids[i], NULL, customer, NULL);
}
for(int i = 0; i < 5; i++) {
pthread_detach(ptids[i]);
pthread_detach(ctids[i]);
}
while(1) {
sleep(10);
}
pthread_mutex_destroy(&mutex);
pthread_exit(NULL);
return 0;
}
openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐
 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)