ROS系统使用
1.打开一个终端命令安装ros操作系统2.运行ros系统roscore这样ros核心就启动起来了这个弹出的界面可以控制机器人的速度4.安装测试对象:仿真小乌龟这样就会弹出一个小窗口,里边有一只卡通小乌龟回到控制速度的界面,修改一下速度发送的主题名称,在前面加一个 turtle1/,然后拖动滑杆,小乌龟便可以移动了优质的ROS软件包浏览器输入:www.github.com。
一.使用ROS
1.打开一个终端命令
输入:
sudo apt install ros-noetic-rqt-robot-steering安装ros操作系统
2.运行ros系统
另外打开一个终端输入:
roscore这样ros核心就启动起来了
3.回到第一个终端窗口输入:
rosrun rqt_robot_steering rqt_robot_steering这个弹出的界面可以控制机器人的速度
4.安装测试对象:仿真小乌龟
再打开一个终端程序,输入命令:
sudo apt install ros-noetic-turtlesim再输入指令:
rosrun turtlesim turtlesim_node这样就会弹出一个小窗口,里边有一只卡通小乌龟
回到控制速度的界面,修改一下速度发送的主题名称,在前面加一个 turtle1/,然后拖动滑杆,小乌龟便可以移动了
二.开源自由市场:Github
优质的ROS软件包
浏览器输入:www.github.com
1.建立工作空间
所看到的ROS系统本身以及ROS Index网站上看到的大部分软件包,都在github开放了源代码,但其本身需要经下载后编译才能运行,所以需要先建立一个工作空间
打开一个终端并输入: 创建工作空间目录结构
mkdir catkin_ws建立并进入这个文件夹:
cd catkin_ws创建一个子目录:
mkdir src这样就建立好了一个工作空间,我们的源代码工程全部放到src子目录里边,才可以正常编译,cd src进入这个子目录,就可以从github上下载源代码了,不过下载之前还需要安装一个工具
在终端程序中输入:
sudo apt install git就可以从github上下载软件包并运行了
2.下载源代码并运行
搜索需要的源代码,点击绿色的code按钮,会弹出网址,复制并打开终端,在src文件夹中输入:
git clone在指令后面粘贴上网址然后回车,就会从github上克隆源代码,便可以下载运行了
3.下载仿真环境Gazebo
1.在github网站搜索wpr_simulation,并找到6-robot这一项,点击code,复制网址就
注:scripts目录用于放置脚本文件和python程序
2.点开scripts文件夹,空白区域点击在终端中运行,输入
./install_for_noetic.sh3.使用脚本安装编译器需要的依赖库,等安装包完成后,回到工作空间的入口地址
4.在~/catkin_ws目录下运行catkin_make进行编译,终端程序输入并回车:
cd ~/catkin_ws5.使用source指令载入工作空间的环境设置,终端程序输入:
source ~/catkin_ws/devel/setup.bash6.使用roslaunch运行编译好的ROS程序
roslaunch wpr_simulation wpb_simple.launch会出现一个三维界面,便是常用的仿真环境
可以用速度控制软件控制环境中的小车移动,新建终端窗口:
rosrun rqt_robot_steering rqt_robot_steering补充:通常会把设置工作空间环境参数的source指令添加到终端程序初始化的脚本~/.bashrc文件中,这样每次打开终端便可以马上运行ROS程序
将source指令添加到.bashrc脚本中,终端程序输入:
gedit ~/.bashrc并找到文件末尾,新添加一行:
source ~/catkin_ws/devel/setup.bash保存关闭即可
三.VScode
1.安装vscode
打开浏览器,进入百度,搜索进入官方界面,下载Ubuntu版本,下载完成后点击下载栏目文件夹,在终端中打开,然后输入指令:
sudo dpkg -i code并点击tab键补全输入code启动,便可打开,然后将其固定在左侧文件夹
2.导入工作空间
点击右上角的file,点击Add Folder to Workspace,添加一个工作空间
3.安装工作插件
1.安装ROS插件
搜索ros,安装替换版
2.安装CMake插件
搜索找到cmake tools,安装
3.安装括号软件颜色插件
搜索bracket下载即可
四.terinator
1.ubuntu终端使用体验
启动ros系统,并打开了另一个终端输入,启动仿真系统:
roslaunch wpr_simulation wpb_simple.launch新建另一个终端窗口,输入启动速度面板:
rosrun rqt_robot_steering rqt_robot_steering2.安装terminator软件包
打开终端输入:
sudo apt install terminator然后按住键盘ctrl+alt+t,启动
效果主要是一个窗口可以同时运行多个终端命令
补充:rostopic常用指令
rostopic list 列出当前系统中所有活跃着的话题
rostopic echo 主题名称 显示指定话题中发送的消息包内容
rostopic hz 主题名称 同济指定话题中消息包发送频率
五.创建订阅者节点
软件包创建
打开终端,将软件包创建在catkin_ws工作空间的src子目录下
创建package软件包的步骤:
1.创建在~/catkin_ws/src文件夹里
2.catkin_create_pkg <包名><依赖项列表>
输入:
cd catkin_ws/src/
catkin_create_pkg atr_pkg rospy roscpp std_msgs然后切换回VScode,就能看到软件包了
将其展开,在src子目录上创建源码文件,就可以编写源代码了
六.launch指令
1.XML语法:
<标记名称 属性名1=“属性值1” ...> 内容 </标记名称>
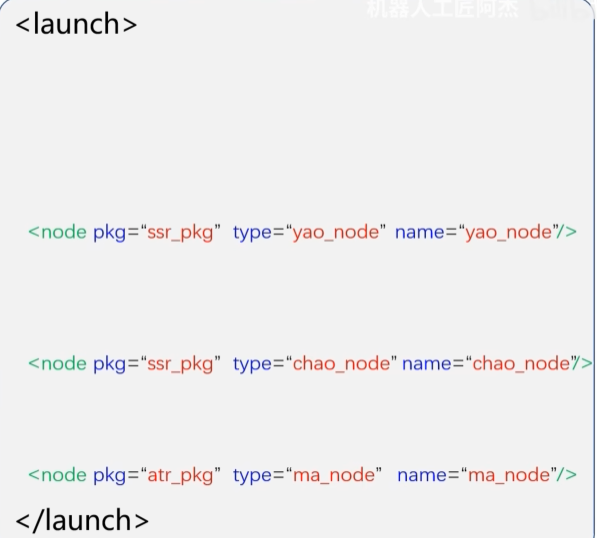
通过获取各项数据,填入launch包里,就可以一次性打开所有节点
2.编写运行launch文件
launch子目录可以放在任何一个子目录里,但为了方便起见,新建一个子目录,而launch可以放在任何一个软件包下,在VScode中创建一个文件夹,写出节点名及包名后打开终端运行
注:在launch文件中,为节点添加output=“screen”属性,可以让节点信息输出在终端中(ROS_WARN不受该属性控制)

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐

 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)