[具身智能-706]:ROS 2 传感器感知功能包:ros2_control背景、功能详解 + 代码示例
是 ROS 2机器人控制的“操作系统内核”硬件抽象、实时闭环、模块化复用、标准统一URDF 定义接口 → 实现硬件插件 → 配置控制器 → Launch 启动机械臂 (MoveIt)、移动底盘 (Navigation)、仿生机器人、力控作业必备底层框架ros2_control。
·
ros2_control 是 ROS 2 中通用、实时、硬件抽象化的机器人控制核心框架,彻底解决了 “控制与硬件强耦合、控制器(不是执行器)重复开发” 的痛点,是机械臂、移动机器人、仿生机器人等底层运动控制的工业标准方案。
一、背景与核心定位
1. 诞生背景
- ROS 1 痛点:
ros_control虽实现硬件抽象,但架构老旧、实时性弱、接口固化(仅支持位置 / 速度 / 力)、不支持多执行器协同。 - ROS 2 革新需求:适配 DDS 通信、实时内核、组件化、生命周期管理,支持多关节、多传感器、多执行器(多电机相互协同)复杂机器人。
- 核心目标:硬件无关化、控制器复用、实时控制、标准化接口,让上层应用(MoveIt、Navigation)无需关心底层电机 / 舵机型号ros2_control。
2. 核心优势
- 硬件抽象:通过 StateInterface / CommandInterface 屏蔽底层驱动,一套控制器适配所有硬件ros2_control。
- 实时性:控制闭环在单进程内运行,无 Topic 通信延迟,支持 1kHz 以上(1ms周期)控制频率。
- 模块化:控制器、硬件、管理器完全解耦,可动态加载 / 切换 / 启停ros2_control。
- 标准化:兼容 URDF、
ros2_controllers提供通用控制器(轨迹、差速、力控)。
3. 核心组件关系
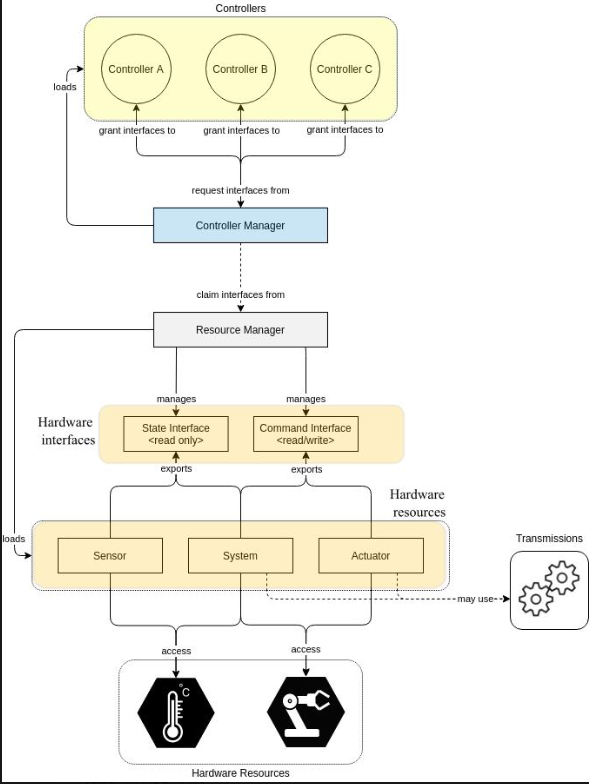
- Controller Manager (CM):核心大脑,管理控制器生命周期、硬件接口匹配、控制循环调度ros2_control。
- Resource Manager (RM):硬件抽象层,加载硬件插件、管理状态 / 命令接口、执行读写操作ros2_control。
- Hardware Interface:驱动插件,对接物理电机 / 传感器,实现
read()/write()。 - Controllers:控制算法(PID、轨迹跟踪、差速逆解),计算控制指令。
二、核心功能与架构详解
1. 核心接口:State & Command (基石)
- StateInterface (状态接口,只读) - 每个关节由独立的状态信息
- 硬件 → 框架:反馈关节位置、速度、力矩、传感器数据。
- 命名:
joint_name/state_type(如joint1/position)。
- CommandInterface (命令接口,读写) - 每个关节由独立的控制指令
- 框架 → 硬件:下发控制指令(位置控制/ 速度控制 / 力矩控制)。
- 互斥访问:一个接口同一时间仅一个控制器占用,防冲突。
2. 硬件接口类型 (3 类)
- SystemInterface (系统级,最常用) : 机械本体
- 适用于多关节一体化机器人(机械臂、差速底盘),统一读写所有关节。
- ActuatorInterface (执行器级) : 执行电机
- 适用于分布式执行器(独立舵机、CANopen 电机),每个执行器独立驱动。
- SensorInterface (传感器级): 传感器
- 独立传感器(IMU、力控传感器),仅提供状态接口。
3. 标准控制器库 (ros2_controllers)
- JointStateBroadcaster:状态广播,将硬件状态转为
sensor_msgs/JointState,供 RViz 可视化。 - JointTrajectoryController:轨迹跟踪,机械臂核心,接收
FollowJointTrajectory目标。 - DiffDriveController:差速底盘控制,将
Twist转为左右轮转速。 - ForwardCommandController:指令转发,直接透传指令(简易控制)。
- Position/Velocity/Effort Controllers:单关节闭环控制。
4. 控制循环流程 (实时闭环)
- read():Resource Manager 从硬件读取所有状态接口。
- update():Controller Manager 调度所有激活控制器(PID算法),计算命令接口。
- write():Resource Manager 将命令写入硬件。
- 频率:由 URDF 中
<update_rate>设定(典型 100–1000Hz)。
三、代码示例(实战:2 自由度机械臂 RRBot)
示例 1:URDF 中定义 ros2_control (关键)
rrbot.ros2_control.xacro —— 声明硬件、接口、参数
xml
<ros2_control name="RRBotSystem" type="system">
<hardware>
<!-- 插件名:自定义或fake_components/GenericSystem(仿真) -->
<plugin>ros2_control_demo_hardware/RRBotHardwareInterface</plugin>
<param name="example_param">42</param>
</hardware>
<joint name="joint1">
<!-- 命令接口:位置控制 -->
<command_interface name="position">
<param name="min">-3.14</param>
<param name="max">3.14</param>
</command_interface>
<!-- 状态接口:位置+速度反馈 -->
<state_interface name="position"/>
<state_interface name="velocity"/>
</joint>
<joint name="joint2">
<command_interface name="position">
<param name="min">-3.14</param>
<param name="max">3.14</param>
</command_interface>
<state_interface name="position"/>
<state_interface name="velocity"/>
</joint>
</ros2_control>
示例 2:硬件接口实现 (C++ 插件)
rrbot_hardware.cpp —— 对接虚拟 / 真实硬件
cpp
运行
#include "hardware_interface/system_interface.hpp"
#include "hardware_interface/handle.hpp"
#include "hardware_interface/hardware_info.hpp"
#include "hardware_interface/types/hardware_interface_return_values.hpp"
#include "rclcpp/rclcpp.hpp"
namespace ros2_control_demo_hardware {
class RRBotHardwareInterface : public hardware_interface::SystemInterface {
public:
// 1. 配置:解析URDF参数、初始化内存
hardware_interface::return_type configure(const hardware_interface::HardwareInfo& info) override {
info_ = info;
// 初始化状态/命令缓冲区
hw_positions_.resize(2, 0.0);
hw_velocities_.resize(2, 0.0);
hw_commands_.resize(2, 0.0);
return hardware_interface::return_type::OK;
}
// 2. 导出接口:CM 感知可用接口
std::vector<hardware_interface::StateInterface> export_state_interfaces() override {
std::vector<hardware_interface::StateInterface> interfaces;
interfaces.emplace_back("joint1", "position", &hw_positions_[0]);
interfaces.emplace_back("joint1", "velocity", &hw_velocities_[0]);
interfaces.emplace_back("joint2", "position", &hw_positions_[1]);
interfaces.emplace_back("joint2", "velocity", &hw_velocities_[1]);
return interfaces;
}
std::vector<hardware_interface::CommandInterface> export_command_interfaces() override {
std::vector<hardware_interface::CommandInterface> interfaces;
interfaces.emplace_back("joint1", "position", &hw_commands_[0]);
interfaces.emplace_back("joint2", "position", &hw_commands_[1]);
return interfaces;
}
// 3. 启动:连接硬件
hardware_interface::return_type start() override {
RCLCPP_INFO(rclcpp::get_logger("RRBot"), "Hardware started!");
return hardware_interface::return_type::OK;
}
// 4. 读取:硬件 → 缓冲区 (模拟)
hardware_interface::return_type read() override {
// 真实场景:串口/CAN 读电机反馈
hw_velocities_[0] = (hw_commands_[0] - hw_positions_[0]) * 0.1;
hw_velocities_[1] = (hw_commands_[1] - hw_positions_[1]) * 0.1;
hw_positions_[0] += hw_velocities_[0] * 0.01; // 0.01s 控制步长
hw_positions_[1] += hw_velocities_[1] * 0.01;
return hardware_interface::return_type::OK;
}
// 5. 写入:缓冲区 → 硬件 (模拟)
hardware_interface::return_type write() override {
// 真实场景:下发指令到电机驱动器
RCLCPP_INFO_STREAM(rclcpp::get_logger("RRBot"),
"Commands: j1=" << hw_commands_[0] << ", j2=" << hw_commands_[1]);
return hardware_interface::return_type::OK;
}
private:
hardware_interface::HardwareInfo info_;
std::vector<double> hw_positions_;
std::vector<double> hw_velocities_;
std::vector<double> hw_commands_;
};
} // namespace
// 注册为插件
#include "pluginlib/class_list_macros.hpp"
PLUGINLIB_EXPORT_CLASS(ros2_control_demo_hardware::RRBotHardwareInterface, hardware_interface::SystemInterface)
示例 3:控制器配置 (YAML)
rrbot_controllers.yaml —— 定义加载哪些控制器
yaml
controller_manager:
ros__parameters:
update_rate: 100 # 控制频率 100Hz
# 1. 状态广播器
joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
# 2. 轨迹控制器
joint_trajectory_controller:
type: joint_trajectory_controller/JointTrajectoryController
joint_trajectory_controller:
ros__parameters:
joints:
- joint1
- joint2
interface_name: position
command_interfaces:
- position
state_interfaces:
- position
- velocity
# 轨迹参数
trajectory_state_interfaces:
- position
- velocity
示例 4:Launch 启动文件
rrbot.launch.py —— 启动完整控制栈
python
运行
from launch import LaunchDescription
from launch_ros.actions import Node, LoadComposableNodes, ComposableNodeContainer
from launch_ros.descriptions import ComposableNode
from ament_index_python.packages import get_package_share_directory
import os
def generate_launch_description():
# 加载 URDF
urdf_path = os.path.join(get_package_share_directory('rrbot_description'), 'urdf', 'rrbot.urdf.xacro')
with open(urdf_path, 'r') as f:
robot_description = f.read()
# 控制器参数
controller_params = os.path.join(get_package_share_directory('rrbot_control'), 'config', 'rrbot_controllers.yaml')
# 1. 启动 Controller Manager
control_node = Node(
package='controller_manager',
executable='ros2_control_node',
parameters=[
{'robot_description': robot_description},
controller_params
],
output='screen'
)
# 2. 加载并激活控制器
load_controllers = Node(
package='controller_manager',
executable='spawner',
arguments=['joint_state_broadcaster', 'joint_trajectory_controller', '--controller-manager', '/controller_manager'],
output='screen'
)
# 3. RViz 可视化
rviz_node = Node(
package='rviz2',
executable='rviz2',
arguments=['-d', os.path.join(get_package_share_directory('rrbot_description'), 'rviz', 'rrbot.rviz')],
output='screen'
)
return LaunchDescription([control_node, load_controllers, rviz_node])
示例 5:命令行测试
bash
运行
# 启动
ros2 launch rrbot_control rrbot.launch.py
# 查看控制器状态
ros2 control list_controllers
# 发送轨迹目标 (rqt_gui)
ros2 run rqt_joint_trajectory_controller rqt_joint_trajectory_controller
四、与 ROS 1 对比
| 特性 | ROS 1 ros_control | ROS 2 ros2_control |
|---|---|---|
| 架构 | RobotHW 单层抽象 | Resource Manager + Controller Manager 双层解耦ros2_control |
| 接口 | 固定:位置 / 速度 / 力 | 灵活自定义 (位置 / 速度 / 加速度 / 力矩 / 位置命令) |
| 实时性 | 多进程,Topic 延迟 | 单进程、零拷贝,硬实时支持 |
| 硬件类型 | 仅 System | System/Actuator/Sensor 三类,适配模块化机器人 |
| 生命周期 | 弱 | 完整生命周期管理 (配置 / 激活 / 停用)ros2_control |
| 插件化 | 基础 | pluginlib 深度整合,动态加载ros2_control |
五、总结
ros2_control 是 ROS 2 机器人控制的 “操作系统内核”:
- 核心价值:硬件抽象、实时闭环、模块化复用、标准统一ros2_control。
- 工作流:URDF 定义接口 → 实现硬件插件 → 配置控制器 → Launch 启动ros2_control。
- 应用:机械臂 (MoveIt)、移动底盘 (Navigation)、仿生机器人、力控作业 必备底层框架ros2_control

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐


 0
0 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)