AUTOSAR CP XCP 移植到裸机 MCU-实践篇
本文系统介绍了将 AUTOSAR CP 风格的 XCP 协议栈移植到裸机 MCU 平台的全流程。首先分析了裸机环境与 AUTOSAR CP 标准环境的差异,以及移植面临的挑战(资源受限、无操作系统、需自行实现底层回调)。然后详细阐述了移植准备阶段的关键步骤:硬件资源评估、源码依赖分析、传输层裁剪(仅保留 XCP on CAN)、非必要功能关闭(动态 DAQ、时间戳、标定页切换、闪存编程、安全解锁等
第 1 章 引言
1.1 为什么需要将 AUTOSAR CP XCP 移植到裸机
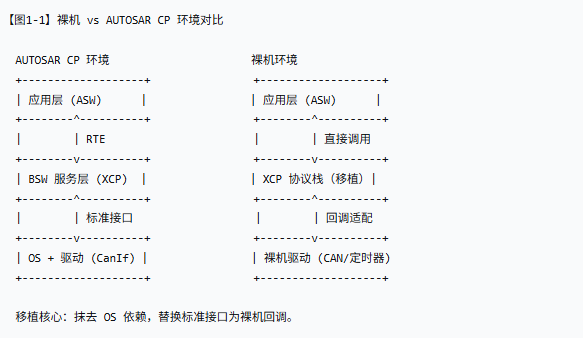
AUTOSAR CP 规范中的 XCP 模块设计精巧、功能完备,但它默认运行在具有操作系统(OS)和复杂基础软件(BSW)的 ECU 上。然而,大量电机控制、BMS、数字电源等产品仍然基于裸机平台开发——没有 RTOS,没有 AUTOSAR BSW 框架,只有中断和主循环。直接使用 AUTOSAR 风格的 XCP 源码会导致依赖缺失、调度错位、资源浪费。因此,将 XCP 协议栈从 AUTOSAR 环境移植到裸机 MCU,是一项具有极高工程价值的工作。
1.2 裸机平台的特点与挑战
裸机环境与 AUTOSAR CP 标准环境相比,存在显著差异:无操作系统、无任务调度表、无标准 BSW 驱动、无运行时环境(RTE)。主要挑战包括:需要自己实现所有底层回调(CAN 驱动、定时器、内存访问);没有任务栈保护,必须极小化中断处理时间;资源受限,必须裁减不必要的 XCP 功能;调度点需适配主循环周期和中断事件。
1.3 本文的目标与范围
本文旨在指导嵌入式开发者从零开始,将一份 AUTOSAR CP 风格的 XCP 协议栈移植到裸机 MCU 上,最终实现:
-
XCP 基础通信(连接、设置地址、上传、下载、获取状态等)
-
静态 DAQ 数据采集(绑定定时器事件,周期性发送 DTO)
全文不涉及具体变量名、函数名,但提供清晰的配置思路、调度设计和适量字符图,读者可直接迁移到任何裸机平台(如 Cortex-M、RISC-V 等)。
第 2 章 移植准备与配置裁剪
2.1 目标裸机平台硬件资源评估
在动手移植之前,必须评估目标平台的硬件资源,确保能够承载一个最小 XCP on CAN 子系统。建议的最低资源为:ROM 8~12 KB(存放 XCP 核心代码),RAM 2~4 KB(存放 FIFO 队列、状态变量等),至少 1 路 CAN 控制器(支持标准帧),一个自由运行定时器(用于生成事件周期)。若资源远高于此,可保留更多功能(如动态 DAQ、安全解锁等);若资源紧张,则需要进一步裁剪。
2.2 源码获取与依赖项识别
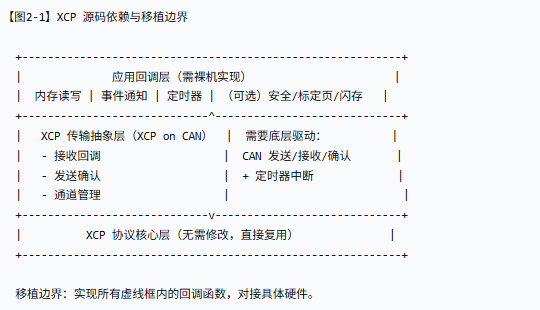
AUTOSAR XCP 源码通常分为三个层次:协议核心层(命令表、状态机、DAQ 引擎、FIFO 管理)、传输抽象层(XCP on CAN,管理 TX/RX 通道、PDU 组装)、应用回调层(内存读写、定时器、安全解锁等)。裸机移植的重点是实现传输抽象层的回调接口(接收指示、发送确认)和应用回调层的硬件相关函数(内存访问、事件通知)。协议核心层无需修改,直接复用。
2.3 通信传输层裁剪:仅保留 XCP on CAN
AUTOSAR 代码中可能包含 XCP on Ethernet、XCP on FlexRay 等分支。在配置头文件中,必须只定义 CAN 相关的宏(如 XCP_PROTOCOL_CAN),同时取消定义所有以太网、FlexRay 相关宏。此外,需要指定 CAN 的命令 ID(CRO_ID)和数据 ID(DTO_ID),以及经典 CAN 的最大帧长(通常 8 字节)。
2.4 关闭非必要功能
根据裸机资源限制,建议关闭以下高级功能(在配置头文件中用 OFF 宏控制):动态 DAQ(需要堆管理,实时性不确定)、时间戳(需要全局高精度定时器,可后续再加)、标定页切换(需要 Flash 换页机制,多数裸机不用)、闪存编程(风险高,可离线烧录)、Seed & Key 解锁(简化握手流程)、STIM 激励(不常用)。关闭这些功能后,XCP 模块仅保留基础通信和静态 DAQ,代码体积和内存占用大幅下降。
2.5 静态 DAQ 参数配置
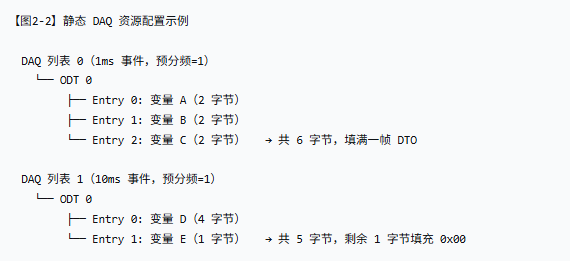
裸机通常使用静态 DAQ模式(所有列表、ODT、Entry 编译时固定)。需配置以下数量:DAQ 列表个数通常 1~2 个(例如一个用于高速采集,一个用于低速);每个列表的 ODT 个数一般 1 个(一个 DTO 帧打包多个变量);每个 ODT 的 Entry 个数取决于单帧有效载荷——对于 CAN 8 字节,除去 PID 占用后最多 6 字节。如果变量长度可变(1 字节、2 字节、4 字节),需合理编排 Entry 顺序以充分利用帧空间。
2.6 事件通道与 CTO/DTO 帧长度配置
事件通道数量根据实际采集周期需求设定。典型配置:事件通道 0 绑定到 1ms 定时器(用于高速控制变量),事件通道 1 绑定到 10ms 定时器(用于状态变量),事件通道 2 绑定到 100ms 定时器(用于温度等慢变量)。帧长度:CAN 经典帧数据场最大 8 字节,因此 CTO 和 DTO 的最大长度均设为 8。注意 CTO 响应帧和命令帧共用同一最大长度限制,DAQ 的 DTO 帧也受此限制。
2.7 CAN ID 分配与通信参数设定
分配两个 CAN ID:一个用于命令/响应(CTO),一个用于 DAQ 数据(DTO)。例如:CRO_ID(命令接收)设为 0x317,DTO_ID(DAQ 发送)设为 0x216。如果项目中已经存在 CCP 或其他协议,可以复用原有 CAN ID,但需确保 XCP 和 CCP 不会同时运行以避免冲突。另外,CAN 通信参数(波特率、采样点等)需与上位机工具匹配,通常设为 500kbps。
第 3 章 底层驱动对接与集成调度
3.1 CAN 驱动需求分析
裸机平台必须提供三个基础的 CAN 服务,供 XCP 传输层调用:
-
CAN 初始化:配置波特率、接收过滤器(允许 XCP 的 CAN ID)、启用中断。
-
发送函数:接受 CAN ID、数据指针、长度,将帧发送出去(通常采用非阻塞方式,放入硬件发送邮箱或队列)。
-
发送完成回调:当硬件发送完一帧后,调用注册的回调函数,用于通知 XCP 模块释放发送通道并触发下一帧。
-
接收回调:在 CAN 接收中断中,调用注册的回调函数,将收到的帧数据传递给 XCP 模块。
如果 CAN 驱动原生不支持发送完成回调,可用轮询标志结合主循环模拟,但效率较低且可能丢失发送确认。建议在移植时优先保证驱动支持发送完成中断,这与 XCP 的流控机制紧密相关。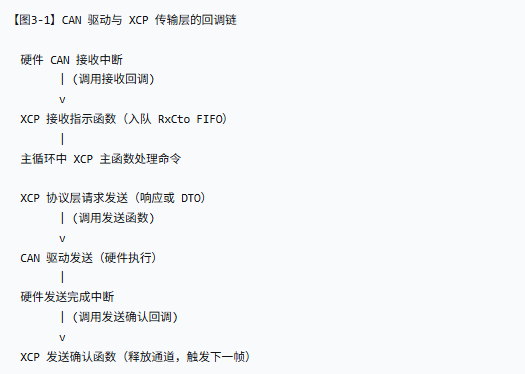
3.2 定时器中断与事件通道的映射
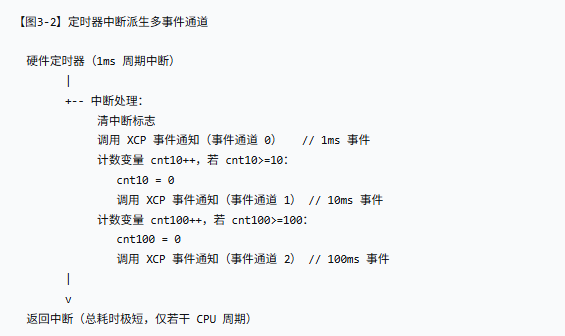
XCP 需要一个“事件通道”来触发 DAQ 采集。这通过硬件定时器实现。例如,配置一个 1ms 周期的定时器中断,在中断处理函数中清除中断标志,然后调用 XCP 的事件通知接口(传入事件通道 0 编号)。若需要 10ms 和 100ms 事件,可以在同一个 1ms 中断中累加计数器,每 10 次调用事件通道 1,每 100 次调用事件通道 2。关键约束:事件通知函数必须极短,通常只设置一个 volatile 标志位,或者将一个事件编号放入轻量级队列中,绝不能在中断内进行数据采集或发送 CAN 帧,否则会严重干扰实时控制任务。
3.3 内存访问回调实现
XCP 的 UPLOAD / DOWNLOAD 命令需要读写任意内存地址。在裸机中直接使用指针操作即可,但必须增加地址范围校验,防止访问非法区域(如只读的 Flash 区域、不存在的地址空间)。实现两个回调函数:读内存(从指定地址复制指定长度到缓冲区)和写内存(从缓冲区复制到指定地址)。校验逻辑包括:地址是否在允许的 RAM 或 Flash 范围内,长度是否会导致越界,写操作是否允许(通常 Flash 不允许直接写,需要特殊操作)。如果地址非法,回调返回错误码,XCP 协议层会向上位机返回越界错误。
3.4 临界区保护机制
裸机环境中,中断和主循环可能同时访问 XCP 的共享数据结构(如接收 FIFO、发送队列、DAQ 列表)。必须使用临界区保护。最简单的方式是:在访问共享资源前关中断,访问结束后恢复中断。注意关中断时间应极短(仅几微秒),避免影响实时性。如果平台支持嵌套中断,也可使用互斥量或自旋锁,但裸机通常用关中断方式。XCP 模块内部已经通过宏调用临界区进入和退出函数,移植时只需将这些宏映射为实际的关中断/开中断操作即可。
3.5 初始化流程与主循环调度
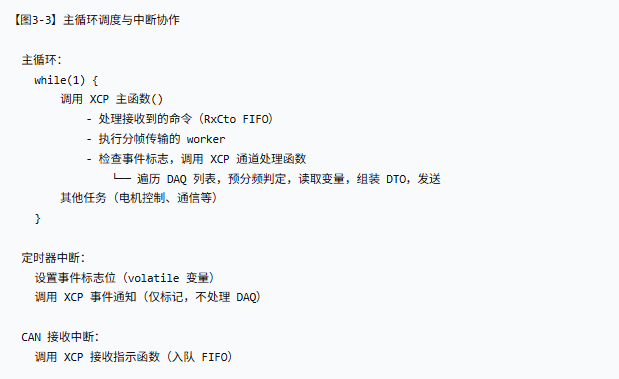
系统启动后,硬件初始化(时钟、GPIO、CAN、定时器)完成后,调用 XCP 初始化接口。该接口完成协议层状态机复位、FIFO 清零、传输层通道初始化、DAQ 列表与事件通道的静态绑定等。初始化后,进入主循环。在主循环中,需要周期性调用 XCP 主函数(建议每 1ms 或 5ms 调用一次,取决于实时性要求)。此外,如果事件通知函数只设置标志位,则主函数中也应遍历事件通道标志,并调用通道处理函数进行实际的 DAQ 采集和 DTO 发送。
3.6 接收回调、事件通知与发送完成回调的挂载时机
接收回调:在 CAN 驱动初始化时,注册 XCP 的接收指示函数。当 CAN 中断收到匹配 ID 的帧时,驱动调用该回调。事件通知:在定时器中断初始化时,将 XCP 的事件通知函数放入中断处理程序中。发送完成回调:在 CAN 驱动初始化时,注册 XCP 的发送确认函数。发送函数被调用后,硬件完成发送时触发中断,驱动调用该回调。以上三个回调是 XCP 与裸机环境之间的唯一接口,正确挂载是移植成功的关键。
第 4 章 调试与验证
4.1 编译链接问题排查
移植后的常见编译问题包括:缺少标准头文件(如 stdint.h、string.h)、宏定义冲突、未实现回调函数导致链接错误。解决方法是:在配置文件中显式定义所有必需宏,提供所有回调函数的空实现或最小实现(先返回成功),并确保编译器搜索路径包含 XCP 源码目录。链接时若出现内存不足错误,可进一步关闭非必要功能,或优化编译选项(如 -Os)。
4.2 使用 CAN 分析工具监控通信
在调试阶段,推荐使用 PC 端 CAN 分析仪(如 PCAN-View、CANalyzer、TSMaster)配合上位机工具(如 CANape、INCA 或免费的 XCP 主站模拟器)。首先确认硬件连接正常,CAN 总线波特率匹配。然后在分析工具中观察 XCP 的 CRO ID 和 DTO ID 是否有报文出现。如果没有收到任何报文,检查 CAN 驱动初始化是否正确,中断是否使能。
4.3 基础命令验证流程
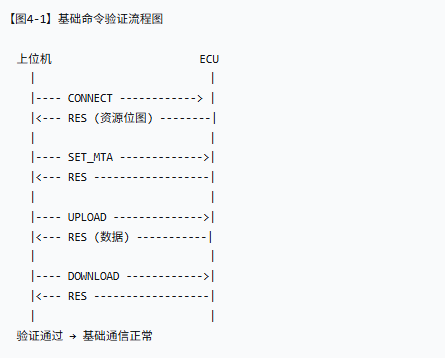
使用上位机工具按顺序发送以下命令,验证 XCP 基础通信:
-
连接命令:期望返回资源位图和通信能力。
-
获取状态命令:期望返回当前会话状态。
-
设置内存地址命令:将地址指针设为 RAM 中某个测试变量。
-
上传命令:读取该测试变量的值,与预期比对。
-
下载命令:修改该测试变量的值,再读回验证。
如果上述命令均成功,说明 XCP 命令处理器、内存访问回调、CAN 收发链路均正常。
4.4 DAQ 采集验证
配置上位机工具加载 A2L 文件,选择几个测量变量,设置 DAQ 列表(绑定到事件通道 0,预分频 1),然后启动采集。观察 DTO 帧是否周期性发送,数据值是否合理变化。如果 DTO 一直为零或没有 DTO 帧,可能原因:事件通知未被调用、预分频器配置错误、DAQ 列表未启动、内存地址无效或读取回调有误。可以使用逻辑分析仪抓取定时器中断和 CAN 发送引脚,确认时序。
4.5 常见问题与解决方案
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 连接无响应 | CAN ID 不匹配、波特率错误、中断未使能 | 检查配置宏和驱动初始化 |
| 命令响应错误码 | 地址越界、资源锁未解锁 | 检查内存回调的地址校验范围 |
| DAQ 不发数据 | 事件通道未触发、预分频器为 0、DAQ 未启动 | 确认定时器中断调用了事件通知,检查 DAQ 模式标志 |
| DTO 数据错乱 | ODT Entry 长度配置错误、字节序问题 | 核对 A2L 中的变量长度与 ECU 实际存储长度 |
| 总线冲突 | CTO 和 DTO 共用同一 ID 导致优先级问题 | 改用不同 CAN ID,或确保发送互斥 |
第 5 章 性能优化与资源权衡
5.1 中断负载评估:事件通知极简设计
事件通知函数在定时器中断中执行,必须极度精简。推荐实现方式:使用一个位掩码的 volatile 变量,每个事件通道对应一个 bit。事件通知函数仅执行 eventFlags |= (1 << channel)。XCP 主函数中检查该变量,并清除相应 bit。这样中断延迟仅在几个 CPU 周期内,不会影响高优先级控制任务。
5.2 RAM 占用优化:FIFO 队列长度与通道数调整
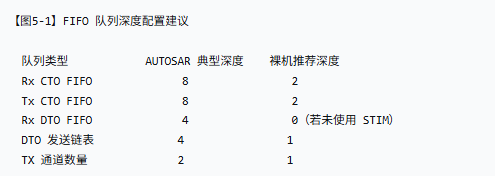
XCP 内部的 FIFO 队列(接收命令队列、发送响应队列、DTO 发送链表)占用 RAM。裸机环境下,可以大幅缩减队列深度。例如,接收命令队列深度设为 2(因为命令处理速度远快于 CAN 接收),发送响应队列深度设为 2,DTO 发送链表深度设为 1(DAQ 帧逐帧发送,无需队列)。另外,如果只有一个发送通道,可以简化通道管理,直接用单个全局变量代替数组。
5.3 总线负载控制:预分频器与 ODT 打包策略
DAQ 采集频率过高会导致 CAN 总线饱和。通过调整事件通道的预分频器可以降低采样率。例如,将 1ms 事件通道的预分频器设为 10,则实际采集周期为 10ms。此外,合理打包 ODT Entry:尽量将同一周期的变量放入同一个 ODT,用满 6 字节有效载荷,减少 DTO 帧数。如果变量总数较多,可以使用多个 ODT(但受静态配置限制)或多个 DAQ 列表分别绑定不同事件通道。
5.4 实时性权衡:数据采集与主控制环路的隔离
核心原则:DAQ 的数据读取和发送绝不能阻塞控制环路。实现方法:
-
控制环路在最高优先级中断中运行,不调用任何 XCP 函数,只调用极短的事件通知(设置标志)。
-
XCP 主函数在最低优先级后台任务中运行(主循环或空闲任务)。
-
对于需要保证数据一致性的多字节变量,在读取前关中断或使用临界区,确保不会读取到被中断更新的不完整数据。
这样既满足了测量采集的需求,又将 XCP 对实时性的影响降到最低。
第 6 章 总结
6.1 移植成果回顾
通过上述步骤,我们成功将 AUTOSAR CP XCP 协议栈移植到裸机 MCU 平台。最终成果包括:
-
一个精简的 XCP on CAN 协议栈,仅支持基础通信和静态 DAQ。
-
与裸机 CAN 驱动、定时器驱动的标准回调接口。
-
主循环调度与中断协作的明确分工。
-
可通过 CANape、INCA 或免费上位机工具进行连接、标定和数据采集。
6.2 裸机环境下 XCP 的适用场景与局限
裸机 XCP 非常适合以下场景:
-
电机控制(FOC)、数字电源、BMS 等需要实时标定和波形观察的产品。
-
资源受限的 MCU(如 Cortex-M0/M3,ROM < 64KB,RAM < 8KB)。
-
研发调试阶段,需要快速验证算法参数。
局限性在于:
-
无法支持动态 DAQ、多 ECU 同步采集等高级功能。
-
总线吞吐量受限于经典 CAN(500kbps),不适合大数据量记录。
-
缺乏 OS 保护,错误的内存访问可能直接导致 HardFault。
6.3 进一步扩展建议
如果未来项目需求升级,可在此基础上逐步增加功能:
-
安全解锁:实现 Seed & Key 算法,保护标定页和 DAQ 配置。
-
时间戳:利用硬件定时器捕获,在 DTO 中添加时间戳。
-
CAN FD 支持:将帧长扩展为 64 字节,大幅提升 DAQ 吞吐量。
-
多通道发送:为 CTO 响应和 DAQ 分配不同 CAN ID,避免互相阻塞。
-
标定页切换:在 Flash 中开辟两个标定页,支持在线无扰切换。
裸机 XCP 的移植为低成本 MCU 带来了强大的标定能力,是汽车电子和工业控制开发人员的实用技能。希望本文能帮助读者顺利完成移植,并在实际项目中发挥 XCP 协议的巨大价值。

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐

 12
12 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)