AUTOSAR CP CANNM 深度剖析:裸机 MCU 架构下 CAN 休眠唤醒核心原理-理论篇
在车载 CAN 总线系统中,多 ECU 节点同步休眠、精准唤醒是整车低功耗设计的核心难点。传统 CAN 通信仅实现数据传输,无统一网络功耗管理机制,极易出现节点功耗失衡、蓄电池亏电等问题。本文基于 AUTOSAR CP 标准,聚焦裸机 MCU 架构,深度拆解 CANNM 网络管理核心原理、分层架构、双层状态机及全网休眠唤醒机制,全程脱离操作系统依赖,贴合车载中低端 MCU 工程落地场景,为车身、底
第 1 章 前言:汽车 CAN 网络管理的核心价值
随着车载电子架构日益复杂,一台乘用车辆搭载的 ECU 数量可多达数十甚至上百个。这些节点依靠 CAN 总线完成指令交互、数据共享,但熄火后的静态功耗一直是行业核心痛点:若节点无统一休眠规则,会持续消耗蓄电池电量,最终导致车辆无法启动。
传统 CAN 只定义数据传输格式,不提供协同休眠唤醒机制。各 ECU 独立决策、各自为政,极易出现 “部分节点醒、部分节点睡” 的混乱状态,既不可靠也不节能。为此,AUTOSAR CP 经典平台推出了CAN 网络管理(CANNM) 模块,作为整车 CAN 的 “统一调度大脑”,解决多节点同步休眠、精准唤醒问题。
在大量车身控制、底盘执行单元中,受成本与资源限制,裸机 MCU(无 OS) 仍是主流方案。裸机环境下实现 AUTOSAR 标准 CANNM,意味着不依赖操作系统调度、不占用大量 RAM/ROM,就能完成轻量化网络功耗管理。这也是本文重点讲解的工程落地方向。
第 2 章 AUTOSAR CANNM 核心概念与运行架构
2.1 CANNM 核心定义
CANNM 是 AUTOSAR CP 定义的分布式车载网络管理协议,专为 CAN 总线设计。它通过一套标准化报文与状态机,让所有 ECU 节点 “听懂彼此状态”,实现全网有序唤醒、同步休眠,从根源上解决功耗与一致性问题。
2.2 CANNM 三大工作逻辑
- 在线宣告:节点需要保持通信时,周期性发送网络管理报文,声明自身活跃。
- 总线监听:所有节点持续监听报文,判断网络是否需要保持活跃。
- 协同控功耗:无节点需求时,全网同步进入低功耗;有需求时快速恢复通信。
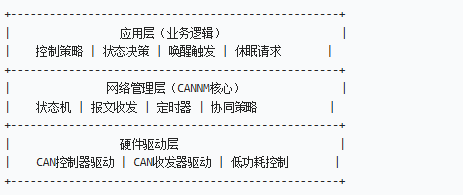
2.3 裸机 MCU 下 CANNM 分层架构
裸机环境不依赖任务调度,因此 CANNM 采用三层解耦架构,结构清晰、易移植、易维护。
2.4 CANNM 与硬件收发器协同逻辑
CANNM 是软件策略中心,硬件收发器是执行单元:
- 休眠时:CANNM 指令收发器进入低功耗,仅保留唤醒监听。
- 唤醒时:收发器检测有效信号,先唤醒 MCU,再由 CANNM 恢复网络。
- 运行时:CANNM 通过驱动层配置收发器滤波、模式、中断。
第 3 章 CANNM 核心状态机机制(重难点)
状态机是 CANNM 的灵魂。AUTOSAR CANNM 采用经典双层状态模型:上层是模式(Mode),宏观定义网络大状态;下层是子状态(State),微观定义行为细节。
3.1 双层状态机设计
- 模式(3 种):总线休眠、准备总线休眠、网络活跃。
- 子状态(4 种):仅在网络活跃模式下存在,用于精细化控制报文发送策略。
3.2 三大核心模式说明
-
总线休眠模式 最低功耗状态,节点停止所有应用通信,MCU 与收发器均进入深度低功耗,仅保留唤醒检测。
-
准备总线休眠模式 休眠前的过渡缓冲,节点停止发报文,但仍监听总线,避免因瞬时静默误休眠。
-
网络活跃模式 正常通信状态,节点可收发业务数据,并按规则发送网络管理报文。
3.3 网络活跃模式下 4 个子状态
- 重复消息状态:唤醒后快速多发报文,让全网快速感知节点上线。
- 正常操作状态:常规周期发送,维持网络活跃。
- 准备睡眠状态:无业务需求,停止发报文,等待超时进入休眠。
- 准备总线休眠状态:最终等待阶段,确认全网静默后进入深度休眠。
3.4 状态流转触发条件
状态切换只由三类事件驱动:
- 定时器超时(重复消息超时、休眠等待超时等)
- 应用层请求(请求网络 / 释放网络)
- 总线报文事件(收到有效网络管理报文)
3.5 裸机轮询调度机制
裸机无 OS,依靠固定周期时基(通常 1ms) 驱动:
- 定时器中断更新计数值
- 主循环轮询调用 CANNM 主函数
- 状态机在周期内完成判断与跳转
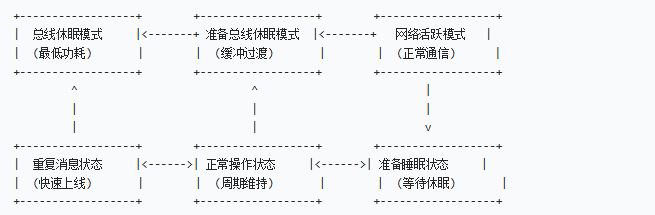
图 2:CANNM 双层状态机流转图
第 4 章 CANNM 休眠与唤醒完整工作流程
4.1 两种唤醒机制
CANNM 将唤醒分为两类,逻辑完全独立、互不干扰:
- 主动唤醒:本地事件触发(如按键、传感器、外部电平信号)。
- 被动唤醒:CAN 总线上的有效报文触发,由硬件收发器识别并唤醒系统。
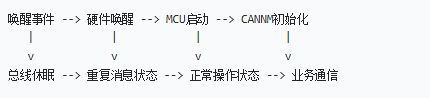
4.2 唤醒全流程(通用时序)
- 唤醒事件到达(本地 / 总线)。
- 硬件收发器输出唤醒信号,启动 MCU 供电。
- MCU 启动,完成外设初始化。
- CANNM 从总线休眠进入网络活跃。
- 先进入重复消息状态,快速发送报文宣告上线。
- 超时后进入正常操作状态,进入常规通信。
4.3 休眠前置条件
节点不能随意休眠,必须同时满足:
- 应用层无通信需求
- 本地已释放网络
- 总线上长时间无其他节点报文
- 无未处理完的业务与故障
4.4 分层休眠流程(从软件到硬件)
- 应用层发起网络释放。
- CANNM 进入准备睡眠状态,停止发报文。
- 超时后进入准备总线休眠,继续监听确保静默。
- 最终进入总线休眠模式。
- CANNM 指令收发器关闭通信,进入最低功耗。
- MCU 进入深度休眠,仅保留唤醒引脚监听。

图 4:CANNM 休眠流程(ASCII)
4.5 整车多节点协同原理
所有 ECU 遵循同一套 CANNM 规则:
- 任一节点唤醒 → 全网被带动唤醒
- 所有节点停止发报文 → 全网同步等待休眠
- 超时后全网一起进入低功耗 最终实现同醒同睡、协同功耗。
第 5 章 裸机架构 CANNM 核心特性与技术优势
5.1 极致轻量化,适配中低端 MCU
裸机 CANNM 不依赖 RTOS/OS,仅需基础定时器、CAN 外设与少量 RAM 即可运行。代码结构精简、可裁剪,适合资源受限的车身 / 底盘类 MCU。
5.2 功耗控制更精准
配合硬件收发器的选择性唤醒 / 滤波,CANNM 可避免总线噪声误唤醒。只有真正有效的唤醒信号才能启动系统,大幅降低静态电流。
5.3 标准兼容,跨平台可移植
遵循 AUTOSAR CP 规范,接口与行为标准化,可在不同 MCU、不同项目间直接复用。分层设计让驱动与协议解耦,更换硬件只需修改驱动层。
5.4 异常容错能力强
CANNM 内置完整异常处理:
- 总线故障 / 总线关闭自动恢复
- 超时防死锁
- 休眠 / 唤醒边界保护
- 供电异常状态回退
在车载恶劣电气环境下依然稳定运行。
第 6 章 总结与技术落地展望
本文完整讲解了AUTOSAR CP CANNM 在裸机 MCU 下的核心原理,从架构、状态机、唤醒 / 休眠流程到工程特性,覆盖开发全维度要点。
CANNM 的本质是车载 CAN 网络的功耗协调器:
- 用标准化状态机保证行为一致
- 用协同机制实现全网同步
- 用裸机架构实现低成本、高可靠落地
在实际工程落地中,核心难点有三点:
- 状态机流转逻辑必须严格遵循 AUTOSAR 行为,避免逻辑漏洞。
- 与 CAN 收发器的低功耗、唤醒、滤波配置必须匹配。
- 定时器周期、超时时间需根据总线负载合理配置。
未来,CANNM 将继续向局部网络(PN)、多网关协同、混合以太网 + CAN 管理方向扩展,但裸机轻量化方案仍会长期占据车身电子、低端控制器的主流地位。掌握 CANNM 原理,是车载网络开发工程师的核心能力之一。

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐


 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)