微分方程、差分方程与指数映射
本文从幂级数定义出发,系统阐述了指数函数从实数到复数再到矩阵的推广过程。首先介绍了实数域上指数函数的极限定义和泰勒展开形式,指出幂级数定义在推广中的核心作用。随后详细讨论了复指数函数(欧拉公式)和矩阵指数的定义与性质。通过微分方程和差分方程两个具体案例,展示了如何利用特征值/特征向量方法和矩阵指数求解线性系统。最后总结指出,幂级数定义保持了指数映射在实数、复数和矩阵上的一致性。全文以统一视角揭示了
微分方程、差分方程与指数映射
(eiθe^{i\theta}eiθ、eAte^{At}eAt 的统一视角)
一、指数函数的基础定义
1. 实数域上的经典定义
对实数 x∈Rx \in \mathbb{R}x∈R,指数函数定义为极限:
ex=limn→∞(1+xn)n e^x = \lim_{n \to \infty} \left(1 + \frac{x}{n}\right)^n ex=n→∞lim(1+nx)n
该定义刻画了连续复利增长的极限行为。
2. 幂级数定义(核心)
基于泰勒展开,对任意 x∈Rx \in \mathbb{R}x∈R:
ex=∑n=0∞xnn!=1+x+x22!+x33!+⋯ e^x = \sum_{n=0}^{\infty} \frac{x^n}{n!} = 1 + x + \frac{x^2}{2!} + \frac{x^3}{3!} + \cdots ex=n=0∑∞n!xn=1+x+2!x2+3!x3+⋯
- 收敛半径:∞\infty∞
- 在整个实数轴上绝对收敛、一致收敛
关键点:
当变量从实数推广到 复数 或 矩阵 时,
不再使用极限定义,而是直接采用幂级数作为严格定义。
二、指数函数的推广:复数与矩阵
1. 复指数 eiθe^{i\theta}eiθ
对 θ∈R\theta \in \mathbb{R}θ∈R,定义:
eiθ=∑n=0∞(iθ)nn! e^{i\theta} = \sum_{n=0}^{\infty} \frac{(i\theta)^n}{n!} eiθ=n=0∑∞n!(iθ)n
展开并分组实部与虚部:
eiθ=(1−θ22!+θ44!−⋯ )+i(θ−θ33!+θ55!−⋯ )e^{i\theta}= \left(1 - \frac{\theta^2}{2!} + \frac{\theta^4}{4!} - \cdots\right)+ i\left(\theta - \frac{\theta^3}{3!} + \frac{\theta^5}{5!} - \cdots\right)eiθ=(1−2!θ2+4!θ4−⋯)+i(θ−3!θ3+5!θ5−⋯)
由此得到 欧拉公式:
eiθ=cosθ+isinθ e^{i\theta} = \cos\theta + i\sin\theta eiθ=cosθ+isinθ
2. 矩阵指数 eAte^{At}eAt
设 A∈Rn×nA \in \mathbb{R}^{n \times n}A∈Rn×n,t∈Rt \in \mathbb{R}t∈R,定义:
eAt=∑k=0∞(At)kk!=I+At+(At)22!+(At)33!+⋯ e^{At} = \sum_{k=0}^{\infty} \frac{(At)^k}{k!} = I + At + \frac{(At)^2}{2!} + \frac{(At)^3}{3!} + \cdots eAt=k=0∑∞k!(At)k=I+At+2!(At)2+3!(At)3+⋯
其中 III 为 n×nn \times nn×n 单位矩阵。
三、微分方程示例
ddt[u1u2]=[0−110][u1u2] \frac{d}{dt} \begin{bmatrix} u_1 \\ u_2 \end{bmatrix} =\begin{bmatrix} 0 & -1 \\ 1 & 0 \end{bmatrix} \begin{bmatrix} u_1 \\ u_2 \end{bmatrix} dtd[u1u2]=[01−10][u1u2]
1. 几何解释
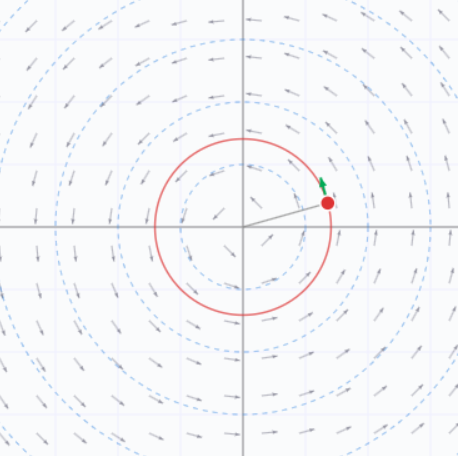
- u1,u2u_1, u_2u1,u2 视为平面坐标
- 左端表示状态随时间的变化率(速度场)
- 右端表示速度向量逆时针旋转 90∘90^\circ90∘
解为绕原点匀速旋转:
[u1(t)u2(t)]=[cost−sintsintcost][u1(0)u2(0)] \begin{bmatrix} u_1(t) \\ u_2(t)\end{bmatrix} = \begin{bmatrix} \cos t & -\sin t \\ \sin t & \cos t \end{bmatrix} \begin{bmatrix} u_1(0) \\ u_2(0) \end{bmatrix} [u1(t)u2(t)]=[costsint−sintcost][u1(0)u2(0)]
2. 特征值 / 特征向量解法
(1)求特征值
det(A−λI)=det[−λ−11−λ]=λ2+1=0 \det(A - \lambda I) = \det \begin{bmatrix} -\lambda & -1 \\ 1 & -\lambda \end{bmatrix} = \lambda^2 + 1 = 0 det(A−λI)=det[−λ1−1−λ]=λ2+1=0
λ1,2=±i \lambda_{1,2} = \pm i λ1,2=±i
(2)求特征向量
对 λ=i\lambda = iλ=i:
(A−iI)v=0⇒[−i−11−i][v1v2]=0 (A - iI)v = 0 \Rightarrow \begin{bmatrix} -i & -1 \\ 1 & -i \end{bmatrix} \begin{bmatrix} v_1 \\ v_2 \end{bmatrix} = 0 (A−iI)v=0⇒[−i1−1−i][v1v2]=0
解得 v2=−iv1v_2 = -i v_1v2=−iv1,取 v1=1v_1 = 1v1=1:
v=[1−i] v = \begin{bmatrix} 1 \\ -i \end{bmatrix} v=[1−i]
(3)复值通解
u(t)=c1eit[1−i]+c2e−it[1i] \mathbf{u}(t) = c_1 e^{it} \begin{bmatrix} 1 \\ -i \end{bmatrix} + c_2 e^{-it} \begin{bmatrix} 1 \\i \end{bmatrix}u(t)=c1eit[1−i]+c2e−it[1i]
(4)化为实值解
利用欧拉公式展开并合并实部与虚部,令系数为实数,得:
{u1(t)=C1cost+C2sintu2(t)=−C1sint+C2cost \begin{cases} u_1(t) = C_1 \cos t + C_2 \sin t \\ u_2(t) = -C_1 \sin t + C_2 \cos t \end{cases} {u1(t)=C1cost+C2sintu2(t)=−C1sint+C2cost
其中 C1,C2∈RC_1, C_2 \in \mathbb{R}C1,C2∈R 由初值决定。
3. 矩阵指数解法
对标量方程 x˙=rx⇒x(t)=ertx(0)\dot{x} = r x \Rightarrow x(t) = e^{rt}x(0)x˙=rx⇒x(t)=ertx(0),
高维情形直接推广为:
u(t)=eAtu(0) \mathbf{u}(t) = e^{At} \mathbf{u}(0) u(t)=eAtu(0)
对本例:
e[0−110]t=∑k=0∞tkk![0−110]k e^{\begin{bmatrix}0 & -1 \\1 & 0\end{bmatrix} t} =\sum_{k=0}^{\infty} \frac{t^k}{k!} \begin{bmatrix} 0 & -1 \\ 1 & 0 \end{bmatrix}^k e[01−10]t=k=0∑∞k!tk[01−10]k
利用幂次周期性可得:
e[0−110]t=[cost−sintsintcost] e^{ \begin{bmatrix} 0 & -1 \\ 1 & 0\end{bmatrix} t}= \begin{bmatrix} \cos t & -\sin t \\ \sin t & \cos t \end{bmatrix} e[01−10]t=[costsint−sintcost]
四、差分方程示例
[xn+1xn]=[1−110][xnxn−1] \begin{bmatrix} x_{n+1} \\x_n\end{bmatrix} =\begin{bmatrix} 1 & -1 \\ 1 & 0 \end{bmatrix} \begin{bmatrix} x_n \\ x_{n-1} \end{bmatrix} [xn+1xn]=[11−10][xnxn−1]
1. 几何观察
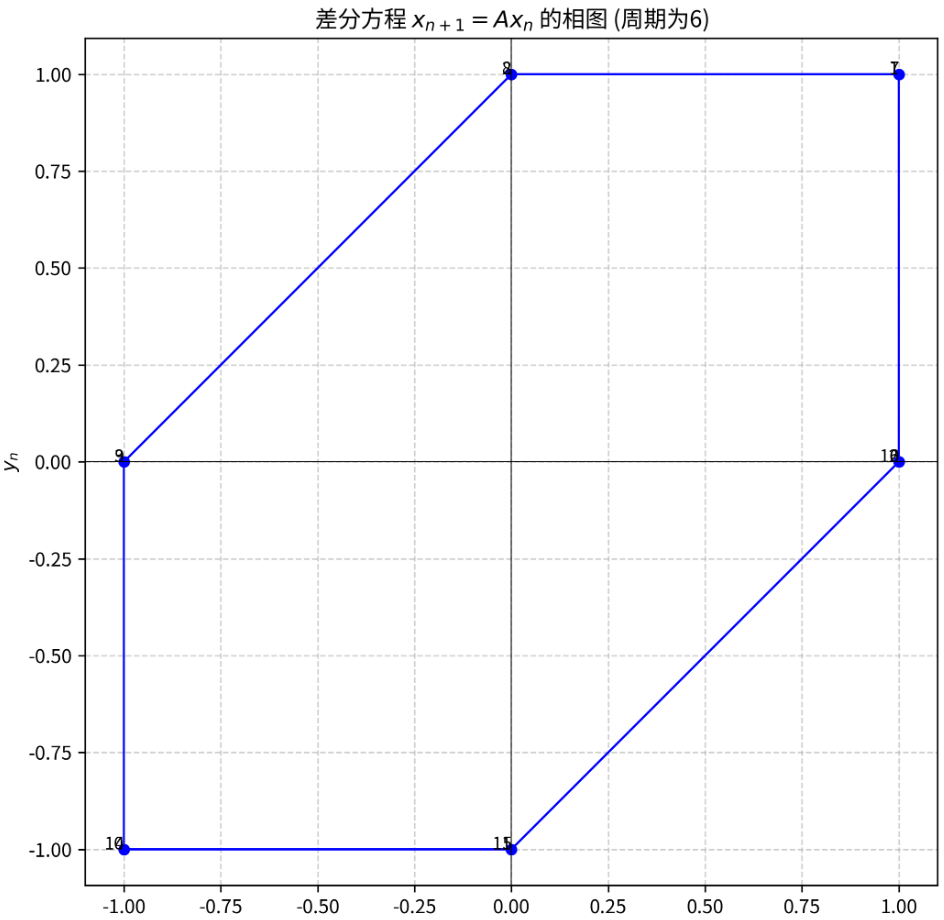
- 状态点在相平面中呈离散旋转
- 系统表现为 周期为 6 的振荡
2. 特征值 / 特征向量解法
(1)特征值
det[1−λ−11−λ]=λ2−λ+1=0 \det \begin{bmatrix} 1-\lambda & -1 \\ 1 & -\lambda \end{bmatrix} = \lambda^2 - \lambda + 1 = 0 det[1−λ1−1−λ]=λ2−λ+1=0
λ=1±i32=e±iπ/3 \lambda = \frac{1 \pm i\sqrt{3}}{2} = e^{\pm i\pi/3} λ=21±i3=e±iπ/3
- 模长:∣λ∣=1|\lambda| = 1∣λ∣=1
- 幅角:θ=π3\theta = \dfrac{\pi}{3}θ=3π
(2)特征向量
对 λ1=eiπ/3\lambda_1 = e^{i\pi/3}λ1=eiπ/3:
v1=[21−i3] \mathbf{v}_1 = \begin{bmatrix} 2 \\ 1 - i\sqrt{3} \end{bmatrix} v1=[21−i3]
对 λ2=e−iπ/3\lambda_2 = e^{-i\pi/3}λ2=e−iπ/3:
v2=[21+i3] \mathbf{v}_2 = \begin{bmatrix} 2 \\ 1 + i\sqrt{3} \end{bmatrix} v2=[21+i3]
(3)复值通解
xn=c1λ1nv1+c2λ2nv2 \mathbf{x}_n = c_1 \lambda_1^n \mathbf{v}_1+ c_2 \lambda_2^n \mathbf{v}_2 xn=c1λ1nv1+c2λ2nv2
(4)实值解
取 c2=c1‾c_2 = \overline{c_1}c2=c1,设 c1=α+iβc_1 = \alpha + i\betac1=α+iβ,得实解:
xn=2α[cos(nπ/3)cos(nπ/3)+3sin(nπ/3)]+2β[−sin(nπ/3)−sin(nπ/3)+3cos(nπ/3)] \mathbf{x}_n = 2\alpha \begin{bmatrix} \cos(n\pi/3) \\ \cos(n\pi/3) + \sqrt{3}\sin(n\pi/3) \end{bmatrix} + 2\beta \begin{bmatrix} -\sin(n\pi/3) \\ -\sin(n\pi/3) + \sqrt{3}\cos(n\pi/3) \end{bmatrix} xn=2α[cos(nπ/3)cos(nπ/3)+3sin(nπ/3)]+2β[−sin(nπ/3)−sin(nπ/3)+3cos(nπ/3)]
五、统一总结
| 情形 | 解的形式 |
|---|---|
| 标量 ODE | x(t)=ertx(0)x(t) = e^{rt}x(0)x(t)=ertx(0) |
| 线性 ODE | x(t)=eAtx(0)\mathbf{x}(t) = e^{At}\mathbf{x}(0)x(t)=eAtx(0) |
| 差分方程 | xn=Anx0\mathbf{x}_n = A^n \mathbf{x}_0xn=Anx0 |
| 复指数 | eiθ=cosθ+isinθe^{i\theta} = \cos\theta + i\sin\thetaeiθ=cosθ+isinθ |
核心思想:
幂级数定义使得指数映射在
实数 → 复数 → 矩阵
之间保持一致。
感谢阅读!如果觉得本文对你有帮助,欢迎关注我的csdn账号@「Ahicert」

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐
 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)