阿里把千问装进机器人,AI 下一站不是聊天框了
阿里把千问装进机器人,AI 下一站不是聊天框了
一句话看懂:千问这次不是陪你聊天,而是开始教机器人动手、认路、预演现实世界。

如果你还以为大模型的战场只在聊天框里,那今天这条消息值得多看两眼。
阿里千问把手伸向了现实世界。
不是再做一个会写文案、会写代码、会总结 PDF 的 AI。
而是发布了一整套面向机器人的 Qwen-Robot 系列。
它给机器人的分工很直接:
一只会动手的手。
一双会认路的脚。
一个能在行动前先预演后果的大脑。
这就是这件事最有冲击力的地方。
过去两年,AI 公司都在争谁的模型更会说话。
现在,千问往前推了一步:
AI 不只要回答世界,它要开始进入世界。
如果你想持续看懂这类 AI 产业变化,可以关注「观复AI」。我们尽量不堆术语,只拆真正会改变产品和生意的信号。

这一次,阿里没有只发一个模型
很多模型发布,听起来很大,落到普通人这里却很远。
参数更大。
跑分更高。
上下文更长。
听完热闹,第二天照样打开聊天框问问题。
但 Qwen-Robot 不一样。
它的目标不是让你多聊几句。
它瞄准的是机器人能不能在真实环境里完成任务。
比如:
你让机器人去厨房拿一个杯子。
它要先看懂房间。
要知道杯子可能在哪。
要能绕开桌椅。
要能把手伸过去。
还要在抓之前判断:这个动作会不会把旁边的东西碰倒。
听起来像人类小孩学走路、学拿东西。
但对机器人来说,这里面每一步都很难。
因为现实世界不会像网页那样规整。
光线会变。
物体会挡住。
房间会换布局。
人的一句话也不会永远标准。
聊天 AI 可以答错一句话再改。
机器人如果伸错一次手,摔坏的可能就是杯子、设备,甚至生产线。
所以这次千问真正想做的,不是“让机器人接入一个大模型”这么简单。
它想给机器人补上一个更通用的底座。
一只手:让机器人不再只会摆拍
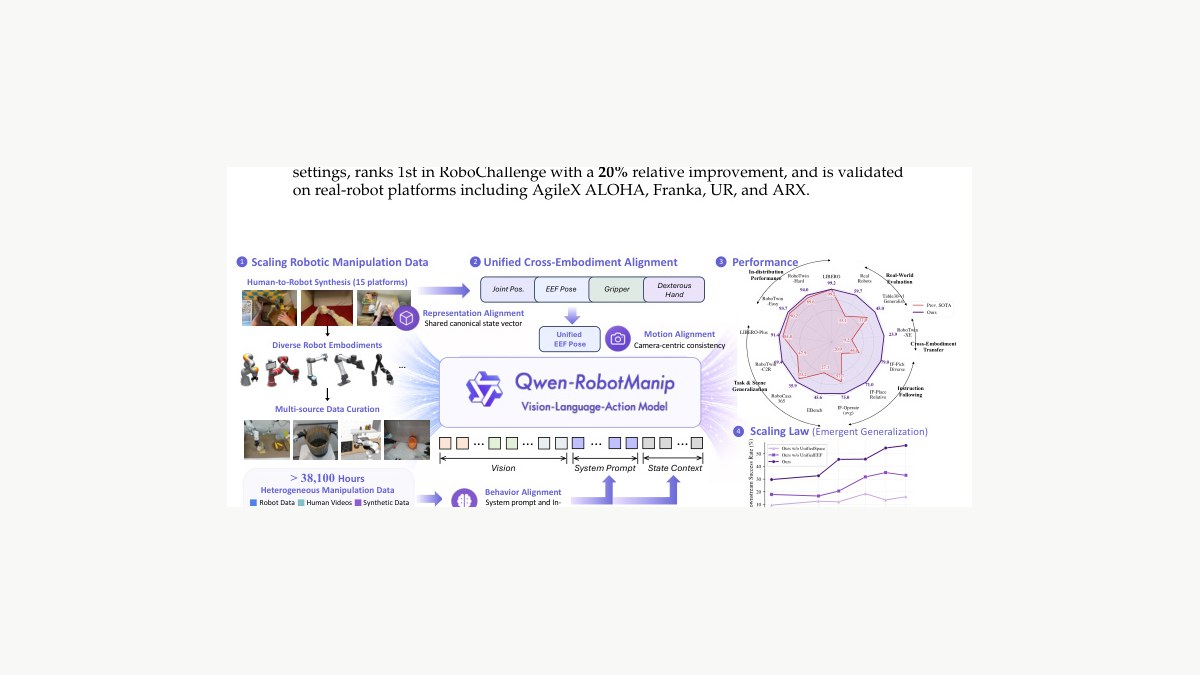
Qwen-RobotManip 对应的是操作能力。
说白了,就是让机器人更会“动手”。
这不是机械臂把固定动作重复一万遍的老问题。
真正难的是,换一个物体、换一个桌面、换一个角度,机器人还能不能做对。
很多实验室视频看起来很酷,但一到复杂现场就露馅。
因为它们学会的不是“拿东西”这件事,而是“在这个环境里,用这个姿势,拿这个东西”。
环境一变,能力就塌。
千问这次想解决的,就是这种泛化问题。
它把不同来源、不同机器人平台、不同动作形态的数据统一起来,让模型不要只记住某一种机器人的动作习惯。
更值得注意的是,Qwen-RobotManip 还引入了大量人类第一视角动作视频,把“人怎么伸手、怎么调整、怎么纠错”的经验转成机器人可用的训练信号。
这一步很关键。
因为真实机器人数据很贵。
每一小时数据都要设备、场地、人工、调试。
如果只能靠机器人自己一点点试,速度会很慢。
但人类动作视频到处都是。
谁能把这些视频变成机器人能吃的训练材料,谁就拿到了更便宜的现实世界样本。
一双脚:机器人要先学会找路
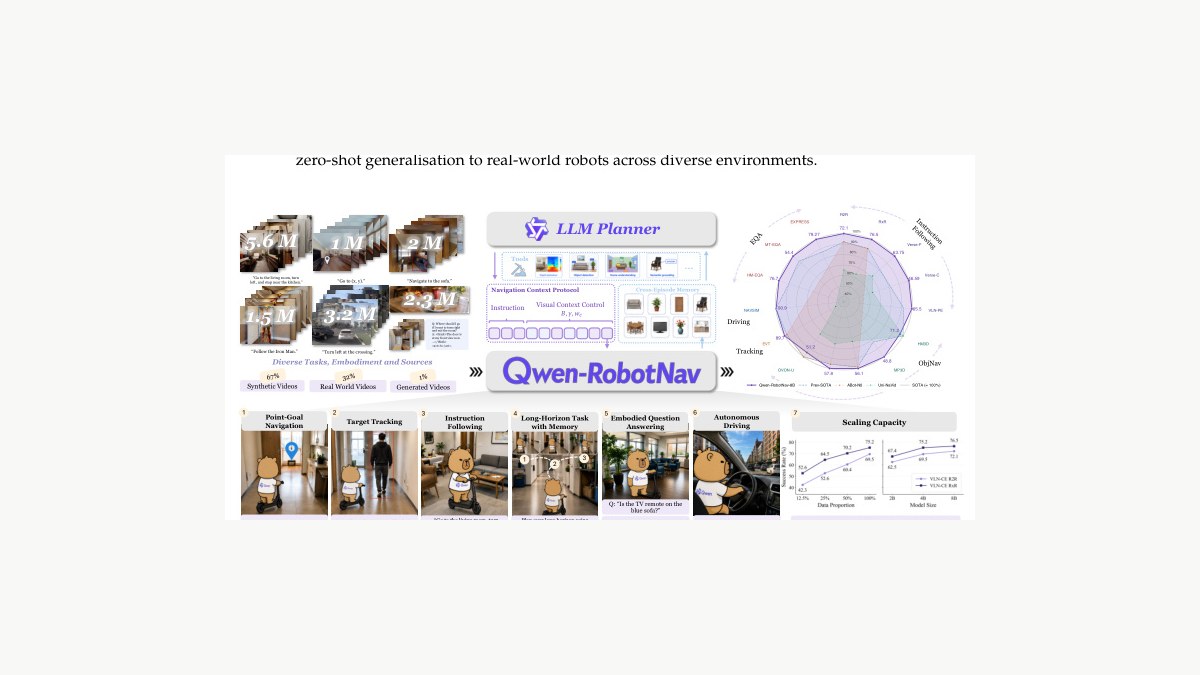
第二个模型叫 Qwen-RobotNav。
它解决的是“怎么走”的问题。
这件事比想象中复杂。
你让机器人“去门口等我”,它不是在地图软件里找最短路线。
它要边走边看。
要判断门在哪里。
要知道前面的人是不是目标。
要记住刚才经过了什么地方。
还要在长距离任务里不断调整策略。
这和聊天框里的问答完全不是一类任务。
聊天模型大多是在文本里推理。
导航模型要把视觉、空间、记忆、动作放到一起。
更麻烦的是,不同场景需要不同观察方式。
找物体时,要多看细节。
跟踪目标时,要盯住动态变化。
自动驾驶时,要持续理解道路、方向和风险。
如果每种任务都重新做一套模型,机器人系统会越来越碎。
Qwen-RobotNav 的思路,是把这些任务放进同一个导航底座里,让上层规划器根据目标切换策略。
这就像给机器人装了一个可调节的空间注意力。
它不是死盯一个画面。
而是根据任务决定该看哪里、记多久、怎么走。
一个大脑:先在脑子里试一遍
第三个模型最有想象力。
Qwen-RobotWorld。
它对应的是世界模型。
世界模型这几个字听起来有点抽象,但可以用一句话理解:
机器人动手之前,先在脑子里放一遍“接下来会发生什么”。
人类每天都在做这件事。
你伸手拿杯子之前,会下意识判断水杯会不会滑、旁边的手机会不会被碰到、桌面够不够稳。
机器人如果没有这种预演能力,就只能边做边试。
试错在数字世界里很便宜。
在现实世界里很贵。
Qwen-RobotWorld 想做的是,把当前画面和语言指令输入进去,预测未来的视觉轨迹。
它不只是服务机械臂,也覆盖室内导航、自动驾驶、人机迁移等多个方向。
这意味着它的价值不只在“生成一段视频”。
更重要的是,它能帮助机器人提前评估动作后果,也能生成更多训练数据,缓解真实采集不足的问题。
这可能是具身智能最核心的一块拼图。
没有世界模型,机器人更像会执行命令的工具。
有了世界模型,机器人开始接近“我知道我这一动会带来什么后果”。
为什么这件事比一次普通发布更重要
这次 Qwen-Robot 的意义,不在于明天你家里就会多一个万能机器人。
没那么快。
现实机器人还要面对硬件成本、可靠性、安全规范、场景适配、供应链和商业闭环。
但方向已经很清楚。
过去,AI 的主战场是屏幕。
搜索、聊天、写代码、做 PPT、生成图片。
这些都发生在数字世界。
下一阶段,AI 公司会争夺现实世界的入口。
仓储。
工厂。
门店。
医院。
家庭。
园区。
车内。
只要机器人开始规模化进入这些场景,模型就不再只是“云端大脑”。
它会变成机器人的操作系统。
谁的模型能看懂环境、规划动作、稳定执行,谁就有机会站到下一轮 AI 商业化的底层。
这也是为什么阿里要做“套件”,而不是单点炫技。
机器人不缺一个会聊天的嘴。
它缺的是能协同工作的手、脚和脑。
聊天框之后,AI 开始争夺身体
大模型刚爆发时,我们最关心的是它会不会写文章。
后来,我们关心它会不会写代码。
再后来,我们开始看它能不能做 Agent,能不能调用工具,能不能替人完成流程。
现在,问题又往前走了一步:
AI 能不能接管一个真实动作?
这是更难、也更大的战场。
因为只要跨进现实世界,AI 就不再只是软件行业的故事。
它会进入制造、物流、服务、交通、能源和城市管理。
它会改变的不只是屏幕上的效率。
而是机器怎么动,空间怎么被使用,人类把哪些体力活和现场判断交出去。
这就是 Qwen-Robot 这条消息真正值得关注的地方。
它不是一个“机器人马上普及”的信号。
它更像一个开场哨:
大模型公司不满足于坐在聊天框里了。
它们开始给 AI 寻找身体。
而一旦 AI 有了身体,竞争就会从“谁更会说”,变成“谁更会做”。
这才是接下来几年最值得看的变化。

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐



 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)