用自然语言控制 ROS2 机器人的完整技术方案
0. 引言
在传统的机器人开发流程中,工程师需要通过命令行工具、ROS2 CLI 或专门开发的控制界面来操作机器人。这种方式虽然精确,但存在明显的使用门槛。调试一个导航任务时,开发者需要反复输入 ros2 topic pub 命令来发布速度指令,或者通过 ros2 service call 来调用服务。对于非技术人员而言,这些操作几乎不可能独立完成。更重要的是,当需要远程操作机器人或进行演示时,传统方式需要 VPN 连接、SSH 登录等复杂的网络配置,这在实际应用场景中带来了巨大的部署和维护成本。
RosClaw 项目的出现改变了这一现状。它通过将 OpenClaw AI Agent 网关与 ROS2 机器人操作系统深度集成,实现了一个革命性的目标:用户可以在 WhatsApp、Telegram、Discord 或 Slack 等日常使用的聊天应用中,用自然语言直接控制机器人。这不仅仅是一个简单的命令转换工具,而是一个完整的智能代理系统,它能够理解用户意图、验证安全性、执行 ROS2 操作并实时反馈结果。从技术架构角度看,RosClaw 解决了三个核心问题:如何将自然语言转换为精确的 ROS2 操作、如何在不同网络环境下建立可靠的通信链路、以及如何确保远程操作的安全性。项目地址: https://github.com/PlaiPin/rosclaw
1. 三层设计的技术实现
RosClaw 的系统架构采用了清晰的三层设计,每一层都有明确的职责边界。最上层是消息接入层,负责统一处理来自 WhatsApp、Telegram、Discord、Slack 等多个聊天平台的消息。这一层的关键在于 OpenClaw Gateway 提供的标准化接口,它将不同平台的消息格式统一转换为内部表示,使得下游的 AI Agent 无需关心消息来源。中间层是 AI Gateway 层,这是整个系统的智能核心。OpenClaw Gateway 在这一层维护用户会话状态、调用大语言模型进行意图理解,并管理跨对话的记忆系统。当用户发送"让机器人前进一米"这样的指令时,AI Agent 会将其解析为具体的工具调用序列。
RosClaw Plugin 作为 OpenClaw 的扩展模块,在这一层注册了一系列 ROS2 工具。这些工具包括 ros2_publish 用于发布话题消息、ros2_subscribe_once 用于读取话题数据、ros2_service_call 用于调用服务、ros2_action_goal 用于发送导航等长时任务目标。每个工具都有详细的参数定义和使用说明,AI Agent 可以根据用户意图自动选择合适的工具组合。安全验证器在工具执行前进行检查,例如限制速度指令的最大值、验证工作空间边界、阻止危险操作等。最底层是 ROS2 层,这里运行着标准的 ROS2 DDS 中间件和各种机器人节点,包括导航栈 Nav2、运动规划库 MoveIt2、相机驱动、传感器驱动等。
用户消息 (WhatsApp/Telegram/Discord/Slack)
↓
OpenClaw Gateway (AI Agent + 工具注册 + 记忆系统)
↓
RosClaw Plugin (工具执行 + 安全验证 + 传输适配)
↓
rosbridge_server (WebSocket ↔ ROS2 DDS)
↓
ROS2 机器人节点 (Nav2, MoveIt2, 传感器, 执行器)
2. 三种部署模式:适配不同应用场景
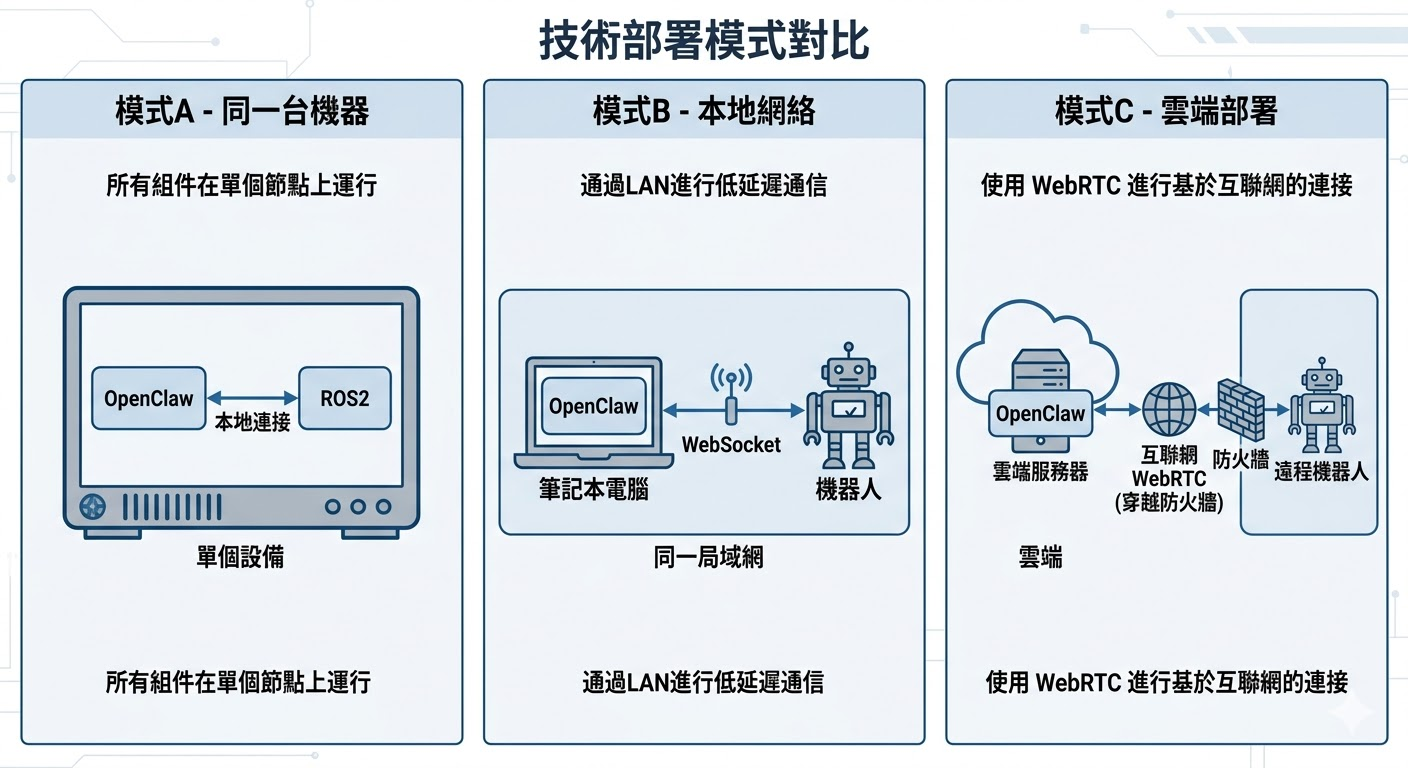
RosClaw 的一大技术亮点是支持三种不同的部署模式,每种模式针对特定的网络环境和应用场景进行了优化。这种灵活性使得 RosClaw 可以从实验室原型快速过渡到生产环境部署。
2.1 模式 A:同机部署 - 嵌入式场景的最优解
在同机部署模式下,OpenClaw 直接运行在机器人的计算单元上。这种模式的核心优势是 RosClaw Plugin 可以通过本地 DDS 总线直接与 ROS2 节点通信,无需任何网络传输层。从技术实现角度看,插件使用 rclnodejs 库创建本地 ROS2 节点,通过进程间通信(IPC)机制与其他节点交互。这种方式的延迟通常在毫秒级别,且完全不受网络波动影响。用户通过互联网连接到 OpenClaw 的消息接口,但机器人控制指令在本地执行,这种架构特别适合边缘计算场景。
典型应用包括服务机器人、AGV 小车、无人机等需要独立运行的移动平台。这些设备通常配备了足够的计算资源(如 Jetson 系列开发板),可以同时运行 ROS2 和 Node.js 环境。部署时只需要确保设备有互联网连接用于接收聊天消息,无需配置复杂的网络穿透或 VPN。安全性方面,由于所有 ROS2 通信都在本地进行,不会暴露在公网上,大大降低了被攻击的风险。
// 模式 A 的传输层实现示例
class LocalTransport implements RosTransport {
private node: rclnodejs.Node;
async initialize() {
await rclnodejs.init();
this.node = new rclnodejs.Node('rosclaw_local');
}
publish(params: PublishParams) {
const publisher = this.node.createPublisher(
params.type,
params.topic
);
publisher.publish(params.msg);
}
subscribe(params: SubscribeParams) {
return this.node.createSubscription(
params.type,
params.topic,
params.callback
);
}
}
2.2 模式 B:局域网部署 - 开发测试的理想选择
局域网部署模式将 OpenClaw 和机器人分离到同一网络的不同设备上。这种架构在实验室和开发环境中最为常见,开发者可以在自己的笔记本或工作站上运行 OpenClaw,通过 WebSocket 连接到机器人上的 rosbridge_server。rosbridge_server 是 ROS2 生态中的标准组件,它将 WebSocket 协议转换为 ROS2 DDS 消息,充当了网络层和 ROS2 层之间的桥梁。
从技术实现角度看,RosClaw Plugin 使用 @rosclaw/rosbridge-client 库建立 WebSocket 连接。这个客户端库实现了完整的 rosbridge 协议,包括话题发布订阅、服务调用、参数读写等操作。协议采用 JSON 格式传输,每个操作都有对应的消息类型。例如发布话题使用 publish 操作,订阅话题使用 subscribe 操作,调用服务使用 call_service 操作。客户端维护了连接状态、自动重连机制和消息队列,确保在网络波动时不会丢失关键指令。
这种模式的优势在于开发灵活性。开发者可以在本地修改 OpenClaw 配置或插件代码,立即看到效果,无需在机器人上重新部署。多个开发者可以同时连接到同一个机器人进行测试,只需配置不同的 OpenClaw 实例。对于多机器人场景,一个 OpenClaw 实例可以管理多个机器人,通过不同的 WebSocket 连接地址区分。延迟方面,局域网环境下通常在几毫秒到几十毫秒之间,对于大多数机器人应用来说完全可以接受。
// 模式 B 的 rosbridge 客户端实现
class RosbridgeTransport implements RosTransport {
private client: RosbridgeClient;
async initialize(url: string) {
this.client = new RosbridgeClient(url);
await this.client.connect();
}
publish(params: PublishParams) {
this.client.send({
op: 'publish',
topic: params.topic,
type: params.type,
msg: params.msg
});
}
subscribe(params: SubscribeParams) {
return this.client.subscribe({
topic: params.topic,
type: params.type,
callback: params.callback
});
}
async callService(params: ServiceParams) {
return this.client.callService({
service: params.service,
type: params.type,
args: params.args
});
}
}
2.3 模式 C:云端部署 - 生产环境的企业级方案
云端部署模式是 RosClaw 最具创新性的架构设计。在这种模式下,OpenClaw 运行在云服务器或 VPS 上,而机器人位于远程网络中,可能在工厂车间、仓库或野外环境。两者之间通过 NAT 和防火墙隔离,无法直接建立连接。RosClaw 使用 WebRTC 技术解决了这个难题。WebRTC 原本是为浏览器实时通信设计的协议,但其 NAT 穿透能力使其成为远程机器人控制的理想选择。
技术实现上,机器人端运行一个轻量级的 ROS2 节点 rosclaw_agent,它主动连接到 STUN/TURN 服务器进行 NAT 穿透。云端的 RosClaw Plugin 同样连接到信令服务器,双方通过 SDP 协商建立点对点的 WebRTC 数据通道。一旦通道建立,所有 ROS2 指令都通过这个加密通道传输,延迟通常在 10-100 毫秒之间,取决于网络质量。关键是双方都只需要出站连接,不需要公网 IP 或开放入站端口,这大大简化了部署复杂度。
这种架构特别适合机器人即服务(RaaS)场景。运营商可以在云端部署统一的 OpenClaw 集群,管理分布在全球各地的机器人车队。用户通过聊天应用连接到云端,选择要控制的机器人,系统自动建立 WebRTC 连接。对于企业客户,这种模式支持多租户隔离、权限管理、操作审计等企业级特性。安全性方面,WebRTC 使用 DTLS 加密所有数据传输,配合 OpenClaw 的身份认证机制,可以确保只有授权用户才能控制特定机器人。
// 模式 C 的 WebRTC 传输层实现
class WebRTCTransport implements RosTransport {
private dataChannel: RTCDataChannel;
private peerConnection: RTCPeerConnection;
async initialize(signalingUrl: string, robotId: string) {
const signaling = new SignalingClient(signalingUrl);
await signaling.connect();
this.peerConnection = new RTCPeerConnection({
iceServers: [
{ urls: 'stun:stun.l.google.com:19302' },
{ urls: 'turn:turn.example.com', username: 'user', credential: 'pass' }
]
});
this.dataChannel = this.peerConnection.createDataChannel('ros2');
const offer = await this.peerConnection.createOffer();
await this.peerConnection.setLocalDescription(offer);
await signaling.sendOffer(robotId, offer);
const answer = await signaling.waitForAnswer();
await this.peerConnection.setRemoteDescription(answer);
}
publish(params: PublishParams) {
const message = {
op: 'publish',
topic: params.topic,
type: params.type,
msg: params.msg
};
this.dataChannel.send(JSON.stringify(message));
}
}
3. ROS2 工具集:AI Agent 的机器人操作能力
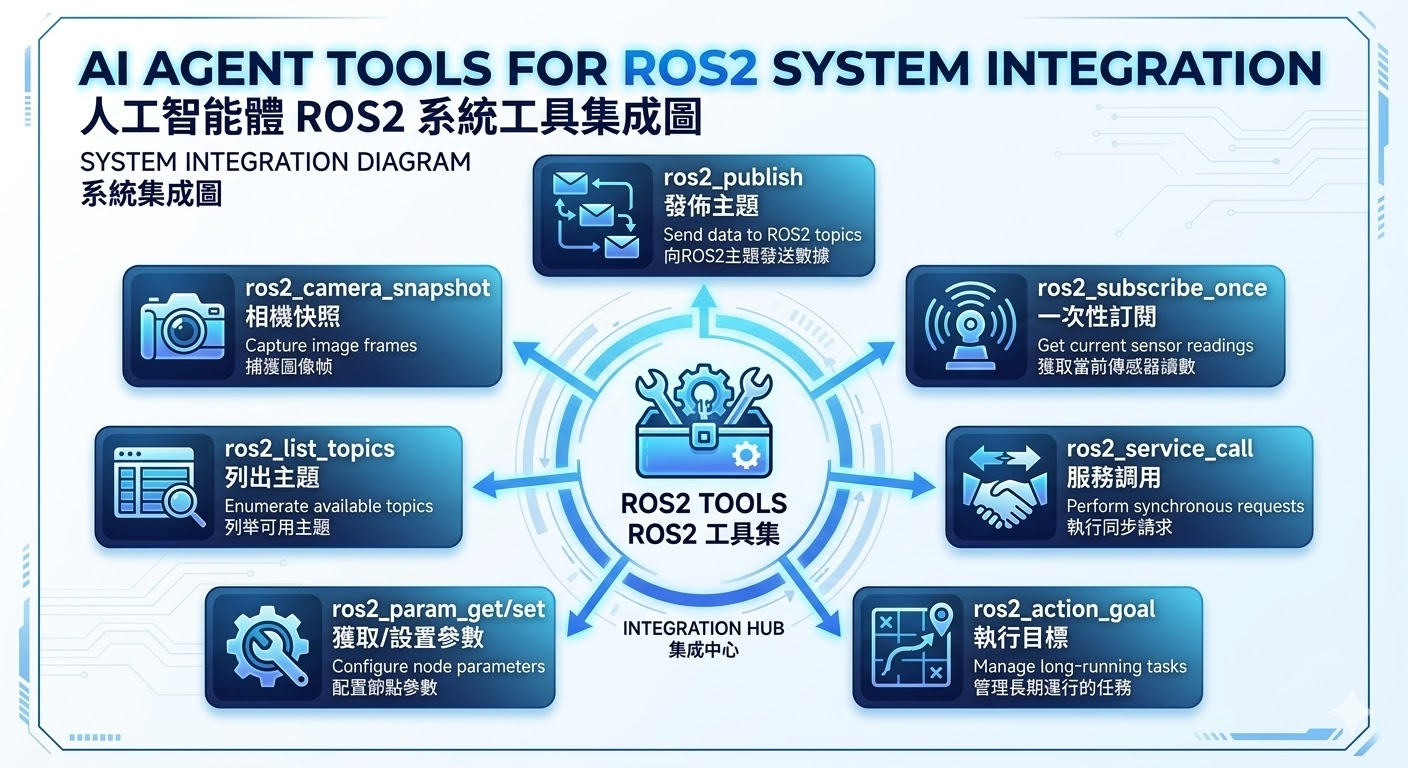
RosClaw Plugin 为 AI Agent 注册了一套完整的 ROS2 操作工具,这些工具是连接自然语言和机器人底层控制的关键桥梁。每个工具都有明确的参数定义和执行逻辑,AI Agent 可以根据用户意图自动选择和组合这些工具。
3.1 ros2_publish:话题发布工具
ros2_publish 是最基础也是最常用的工具,用于向 ROS2 话题发布消息。在 ROS2 架构中,话题是节点之间异步通信的主要方式。例如控制机器人移动需要向 /cmd_vel 话题发布 geometry_msgs/msg/Twist 类型的速度指令。工具的参数包括话题名称、消息类型和消息内容。AI Agent 在理解用户意图后,会自动填充这些参数。
从实现角度看,这个工具调用传输层的 publish 方法,传输层根据部署模式选择合适的通信方式。在模式 A 中直接通过本地 DDS 发布,在模式 B 中通过 WebSocket 发送给 rosbridge_server,在模式 C 中通过 WebRTC 数据通道传输。工具执行前会经过安全验证器检查,例如限制速度指令的最大值,防止机器人失控。执行后返回成功状态和相关信息,AI Agent 将结果转换为自然语言反馈给用户。
// ros2_publish 工具的完整实现
export function registerPublishTool(api: OpenClawPluginApi): void {
api.registerTool({
name: "ros2_publish",
label: "ROS2 Publish",
description: "发布消息到 ROS2 话题,用于发送机器人控制指令",
parameters: Type.Object({
topic: Type.String({
description: "话题名称,例如 '/cmd_vel'"
}),
type: Type.String({
description: "消息类型,例如 'geometry_msgs/msg/Twist'"
}),
message: Type.Record(Type.String(), Type.Unknown(), {
description: "消息内容,需要匹配消息类型的结构",
}),
}),
async execute(_toolCallId, params) {
const topic = params["topic"] as string;
const type = params["type"] as string;
const message = params["message"] as Record<string, unknown>;
const transport = getTransport();
transport.publish({ topic, type, msg: message });
return {
content: [{
type: "text",
text: `已成功发布消息到话题 ${topic}`
}],
details: { success: true, topic, type }
};
},
});
}
3.2 ros2_subscribe_once 和 ros2_service_call:数据读取与服务调用
ros2_subscribe_once 工具用于读取话题的最新消息,这在查询机器人状态时非常有用。例如用户询问"电池电量是多少",AI Agent 会调用这个工具订阅 /battery_state 话题,获取最新的电池状态消息并解析其中的电量信息。与持续订阅不同,这个工具只读取一次最新消息就立即返回,避免占用资源。实现上使用了超时机制,如果在指定时间内没有收到消息,会返回超时错误。
ros2_service_call 工具用于调用 ROS2 服务,这是一种同步的请求-响应通信模式。服务通常用于执行需要返回结果的操作,例如获取机器人的运动学参数、切换工作模式、保存地图等。工具参数包括服务名称、服务类型和请求参数。调用时会等待服务响应,超时时间可配置。这种同步特性使得 AI Agent 可以根据服务返回结果决定下一步操作,实现更复杂的控制逻辑。
// ros2_subscribe_once 工具实现
export function registerSubscribeTool(api: OpenClawPluginApi): void {
api.registerTool({
name: "ros2_subscribe_once",
description: "读取 ROS2 话题的最新消息,用于查询机器人状态",
parameters: Type.Object({
topic: Type.String({ description: "话题名称" }),
type: Type.String({ description: "消息类型" }),
timeout: Type.Optional(Type.Number({
description: "超时时间(毫秒),默认 5000"
}))
}),
async execute(_toolCallId, params) {
const transport = getTransport();
const timeout = (params["timeout"] as number) || 5000;
const message = await new Promise((resolve, reject) => {
const timer = setTimeout(() => {
reject(new Error("订阅超时"));
}, timeout);
const subscription = transport.subscribe({
topic: params["topic"] as string,
type: params["type"] as string,
callback: (msg) => {
clearTimeout(timer);
subscription.unsubscribe();
resolve(msg);
}
});
});
return {
content: [{
type: "text",
text: `话题数据: ${JSON.stringify(message, null, 2)}`
}],
details: { message }
};
}
});
}
3.3 ros2_action_goal:长时任务的异步执行
ROS2 Action 是专门为长时间运行的任务设计的通信模式,例如导航到目标点、执行抓取序列等。与服务的同步调用不同,Action 支持异步执行、实时反馈和任务取消。ros2_action_goal 工具封装了 Action 客户端的完整生命周期管理。
当用户说"导航到厨房"时,AI Agent 会调用这个工具发送导航目标到 Nav2 的 Action 服务器。工具会持续监听 Action 的反馈消息,例如当前位置、剩余距离、预计到达时间等,并将这些信息实时反馈给用户。如果导航过程中遇到障碍物或路径规划失败,Action 服务器会返回错误状态,工具会捕获这些错误并通知 AI Agent。用户也可以随时发送"停止导航"指令,工具会调用 Action 的取消接口。
// ros2_action_goal 工具实现
export function registerActionTool(api: OpenClawPluginApi): void {
api.registerTool({
name: "ros2_action_goal",
description: "发送 ROS2 Action 目标,用于导航、抓取等长时任务",
parameters: Type.Object({
action: Type.String({ description: "Action 名称" }),
type: Type.String({ description: "Action 类型" }),
goal: Type.Record(Type.String(), Type.Unknown(), {
description: "目标参数"
})
}),
async execute(_toolCallId, params) {
const transport = getTransport();
const actionClient = transport.createActionClient({
action: params["action"] as string,
type: params["type"] as string
});
const goalHandle = await actionClient.sendGoal(
params["goal"] as Record<string, unknown>
);
// 监听反馈
goalHandle.onFeedback((feedback) => {
api.streamMessage({
type: "text",
text: `进度更新: ${JSON.stringify(feedback)}`
});
});
// 等待结果
const result = await goalHandle.getResult();
return {
content: [{
type: "text",
text: `任务完成: ${JSON.stringify(result)}`
}],
details: { result }
};
}
});
}
4. 安全验证系统:多层防护机制
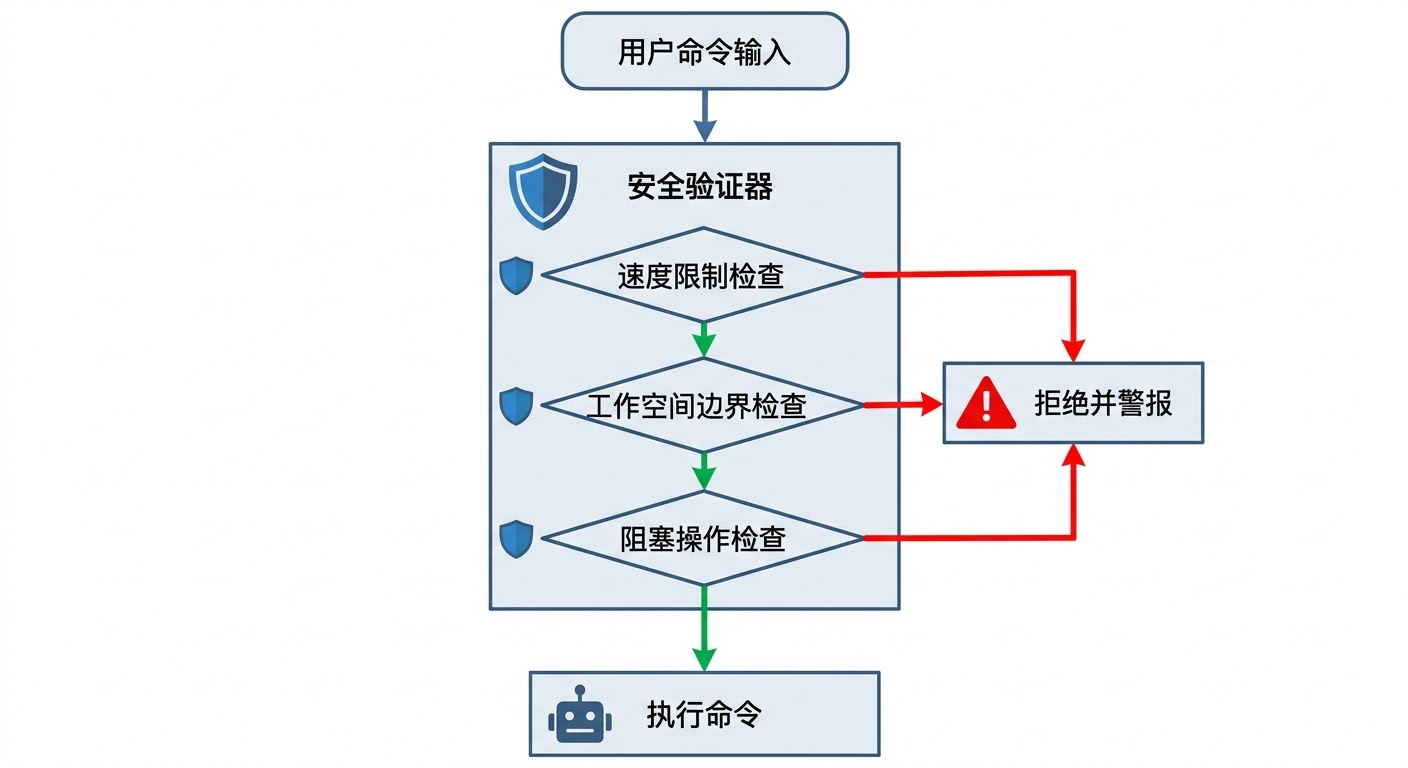
机器人远程控制的安全性至关重要,RosClaw 实现了多层安全验证机制。安全验证器在每个工具执行前进行检查,这是一个可配置的钩子系统,可以根据具体应用场景定制验证规则。
4.1 速度限制与工作空间边界
最基础的安全检查是速度限制。当 AI Agent 准备发布速度指令时,验证器会检查线速度和角速度是否超过配置的最大值。例如在室内环境中,线速度可能限制在 0.5 m/s,角速度限制在 1.0 rad/s。如果超过限制,验证器会拒绝执行并返回错误信息。工作空间边界检查确保机器人不会移动到危险区域,例如楼梯边缘、禁入区域等。这些边界可以通过配置文件定义,也可以从地图服务器动态获取。
// 安全验证器实现
export class SafetyValidator {
private config: SafetyConfig;
async validateToolCall(toolName: string, params: any): Promise<ValidationResult> {
if (toolName === 'ros2_publish' && params.topic === '/cmd_vel') {
const twist = params.message as Twist;
if (Math.abs(twist.linear.x) > this.config.maxLinearVelocity) {
return {
allowed: false,
reason: `线速度超过限制`
};
}
}
if (toolName === 'ros2_action_goal' && params.action.includes('navigate')) {
const goal = params.goal as NavigationGoal;
if (!this.isWithinWorkspace(goal.pose.position)) {
return { allowed: false, reason: `目标位置超出工作空间` };
}
}
return { allowed: true };
}
}
4.2 紧急停止命令:绕过 AI 的安全机制
RosClaw 提供了 /estop 命令,这是一个特殊的紧急停止指令,完全绕过 AI Agent 的处理流程。当用户在聊天窗口输入 /estop 时,系统会立即识别这个命令并直接执行停止操作,无需等待 AI 理解意图或进行工具选择。这种设计确保在紧急情况下能够以最快速度停止机器人。
实现上,/estop 命令在消息处理的最早阶段被拦截。插件注册了一个消息预处理钩子,在消息进入 AI Agent 之前检查是否包含紧急停止命令。如果检测到,立即向 /cmd_vel 话题发布零速度指令,同时取消所有正在执行的 Action 任务。这个过程通常在几十毫秒内完成,远快于通过 AI Agent 处理的正常流程。对于关键应用,还可以配置硬件级的紧急停止按钮,通过 ROS2 的安全认证机制实现物理层面的保护。
// 紧急停止命令实现
export function registerEstopCommand(api: OpenClawPluginApi): void {
api.registerCommand({
name: 'estop',
description: '紧急停止机器人',
async execute() {
const transport = getTransport();
// 立即发布零速度
transport.publish({
topic: '/cmd_vel',
type: 'geometry_msgs/msg/Twist',
msg: {
linear: { x: 0, y: 0, z: 0 },
angular: { x: 0, y: 0, z: 0 }
}
});
// 取消所有 Action
await transport.cancelAllActions();
return {
content: [{ type: 'text', text: '⚠️ 紧急停止已执行' }]
};
}
});
}
5. 实际应用案例:从实验室到生产环境

RosClaw 的灵活架构使其能够适应多种实际应用场景。以下是几个典型的部署案例,展示了系统在不同环境下的实际表现。
5.1 案例一:TurtleBot3 仿真演示
TurtleBot3 是 ROS2 社区最流行的教学和研究平台。RosClaw 提供了完整的 TurtleBot3 Gazebo 仿真演示,这是验证系统功能的理想环境。演示环境通过 Docker Compose 一键启动,包含 ROS2 Humble、rosbridge_server 和 Gazebo 仿真器。用户配置好 OpenClaw 实例后,可以通过 WhatsApp 或 Telegram 发送指令控制虚拟机器人。
典型的交互流程是这样的:用户发送"前进两米",AI Agent 理解意图后调用 ros2_publish 工具,向 /cmd_vel 话题发布速度指令。Gazebo 中的 TurtleBot3 模型接收到指令后开始移动,同时发布里程计数据到 /odom 话题。AI Agent 订阅里程计数据,实时计算已移动的距离,当达到目标距离时发布停止指令。整个过程中,用户在聊天窗口看到的是"正在前进…已移动 1.2 米…已到达目标位置"这样的自然语言反馈。
# 启动 TurtleBot3 演示环境
cd rosclaw/docker
docker compose up
# 配置 OpenClaw 连接到 ws://localhost:9090
# 在聊天应用中测试各种指令
5.2 案例二:工业 AGV 车队管理
在工业物流场景中,RosClaw 展现了其在多机器人管理方面的能力。某制造企业部署了十台 AGV 小车用于车间物料搬运,传统方式需要专门的调度系统和控制界面。采用 RosClaw 后,物流主管可以直接在企业微信中发送指令,例如"让 3 号车去 A 区装货"或"查看所有车辆的电量状态"。系统采用模式 B 部署,OpenClaw 运行在车间的边缘服务器上,通过局域网连接到各台 AGV 的 rosbridge_server。
技术实现上,每台 AGV 在系统中注册为独立的机器人实例,包含唯一标识符和能力描述。AI Agent 维护了一个机器人上下文管理器,记录每台车的当前状态、位置和任务。当用户指定某台车时,系统自动切换到对应的传输连接。对于"查看所有车辆状态"这类批量查询,AI Agent 会并发调用多个 ros2_subscribe_once 工具,从各台车的 /battery_state 和 /odom 话题读取数据,然后汇总成一份报告。这种方式大大简化了车队管理的复杂度,操作人员无需学习专业的调度软件,用自然语言就能完成日常管理任务。
5.3 案例三:远程科研机器人操作
某大学的机器人实验室部署了多台研究用机械臂和移动平台,研究生需要在校外远程进行实验。传统方案需要 VPN 连接和复杂的网络配置,且存在安全隐患。采用 RosClaw 的模式 C 部署后,实验室在云端运行 OpenClaw 实例,各台机器人通过 WebRTC 连接到云端。研究生只需在手机上打开 Telegram,就能控制实验室的机器人。
这个场景特别强调安全性。系统配置了严格的权限管理,每个研究生只能控制分配给自己的机器人。安全验证器根据用户身份加载不同的规则集,例如本科生只能执行预定义的安全动作,研究生可以发送自定义指令但有速度限制,导师账号拥有完全权限。所有操作都记录到审计日志,包括用户身份、执行时间、具体指令和执行结果。WebRTC 的端到端加密确保控制指令不会被中间人截获。这种部署方式使得远程实验变得安全可控,同时保持了操作的便捷性。
6. 学术界的探索:上海交大 MINT 实验室的 RoboClaw 项目
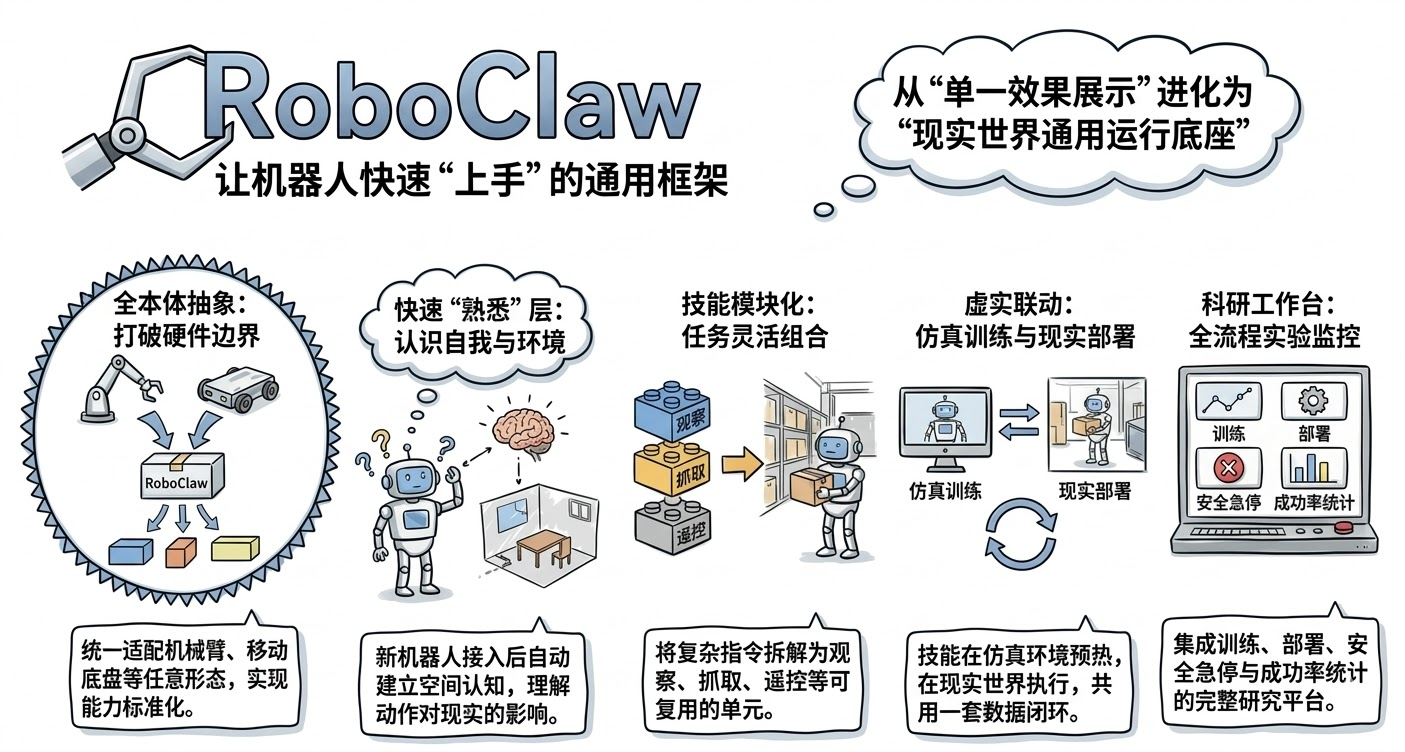
在 RosClaw 项目展示了自然语言控制机器人的可行性之后,学术界也开始探索更深层次的问题。上海交通大学 MINT 实验室推出的 RoboClaw 项目,代表了这一方向上的重要尝试。与 RosClaw 专注于通过聊天应用控制机器人不同,RoboClaw 要解决的是一个更根本的挑战:当本体变了、传感器变了、环境变了、任务变了,系统、技能和记忆还能不能快速迁移?
6.1 从控制接口到具身理解的范式转变
…详情请参照古月居

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐
 6
6 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)