FreeRTOS任务调度原理:从源码剖析优先级抢占机制——就绪列表、上下文切换全链路解析
文章目录
每日一句正能量
只有适时示弱,才能避免碰撞,保留内心的宁静平和。
示弱不是懦弱,而是一种主动选择。在无关紧要的冲突里退一步,在不值得的对抗中承认“我不需要赢”,在需要帮助时坦然说出“我不行”。这种示弱避开了无谓的消耗,把能量留给真正重要的事。内心宁静平和的前提,是不用每次都要证明自己很强。
一、前言:RTOS调度的核心之谜
在前面的频谱分析仪项目中,我们使用了FreeRTOS作为实时操作系统来管理多任务并发。然而,许多开发者虽然能熟练使用xTaskCreate()创建任务,却对调度器底层的工作原理一知半解。当系统出现"高优先级任务不执行"、“任务切换异常崩溃”、"调度延迟过大"等问题时,往往束手无策。
本文将深入FreeRTOS内核源码,从数据结构设计到汇编级上下文切换,完整剖析优先级抢占式调度的实现机制。通过阅读本文,你将理解:
- 就绪列表数组如何组织不同优先级的任务
- TCB任务控制块的关键字段与作用
- **vTaskSwitchContext()**如何选择最高优先级任务
- PendSV_Handler如何完成上下文切换的"瞬间移动"
- 优先级抢占的完整时序与边界条件
二、FreeRTOS调度全景图
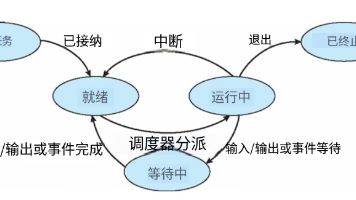
2.1 任务状态机
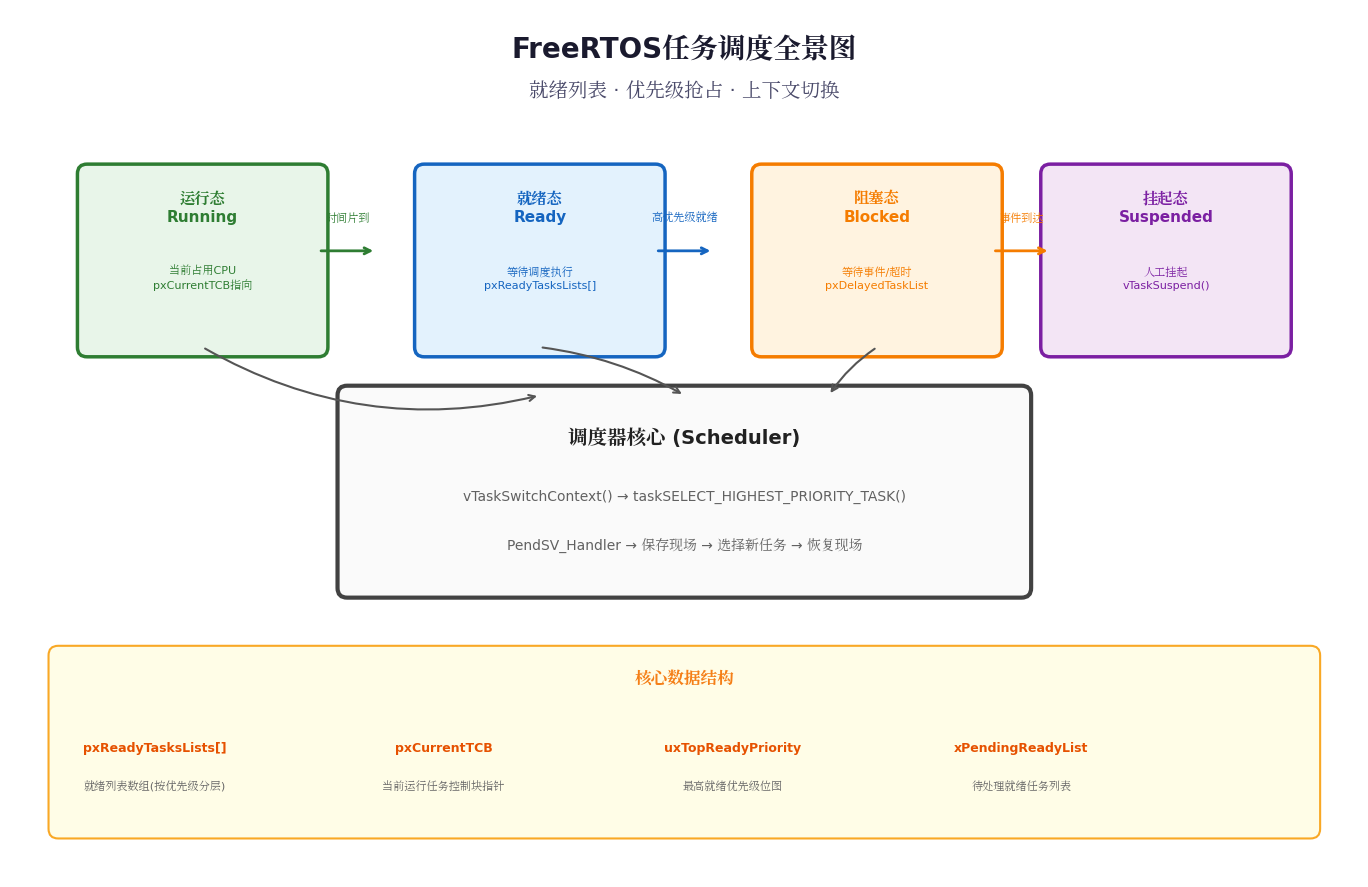
FreeRTOS中每个任务处于以下四种状态之一:
| 状态 | 说明 | 触发条件 |
|---|---|---|
| 运行态(Running) | 当前占用CPU执行任务 | 被调度器选中 |
| 就绪态(Ready) | 等待调度执行 | 任务创建/从阻塞恢复 |
| 阻塞态(Blocked) | 等待事件或超时 | 调用vTaskDelay()/等待信号量 |
| 挂起态(Suspended) | 人工挂起,不参与调度 | 调用vTaskSuspend() |
状态转换的核心驱动力是调度器(Scheduler),它通过vTaskSwitchContext()函数选择下一个运行任务,并通过PendSV_Handler完成上下文切换。
2.2 核心数据结构
FreeRTOS调度器依赖以下关键数据结构:
pxReadyTasksLists[] - 就绪列表数组,按优先级分层管理就绪任务
pxCurrentTCB - 指向当前运行任务控制块的指针
uxTopReadyPriority - 位图变量,记录哪些优先级有就绪任务
xPendingReadyList - 待处理就绪任务列表(中断中标记)
三、就绪列表数组详解
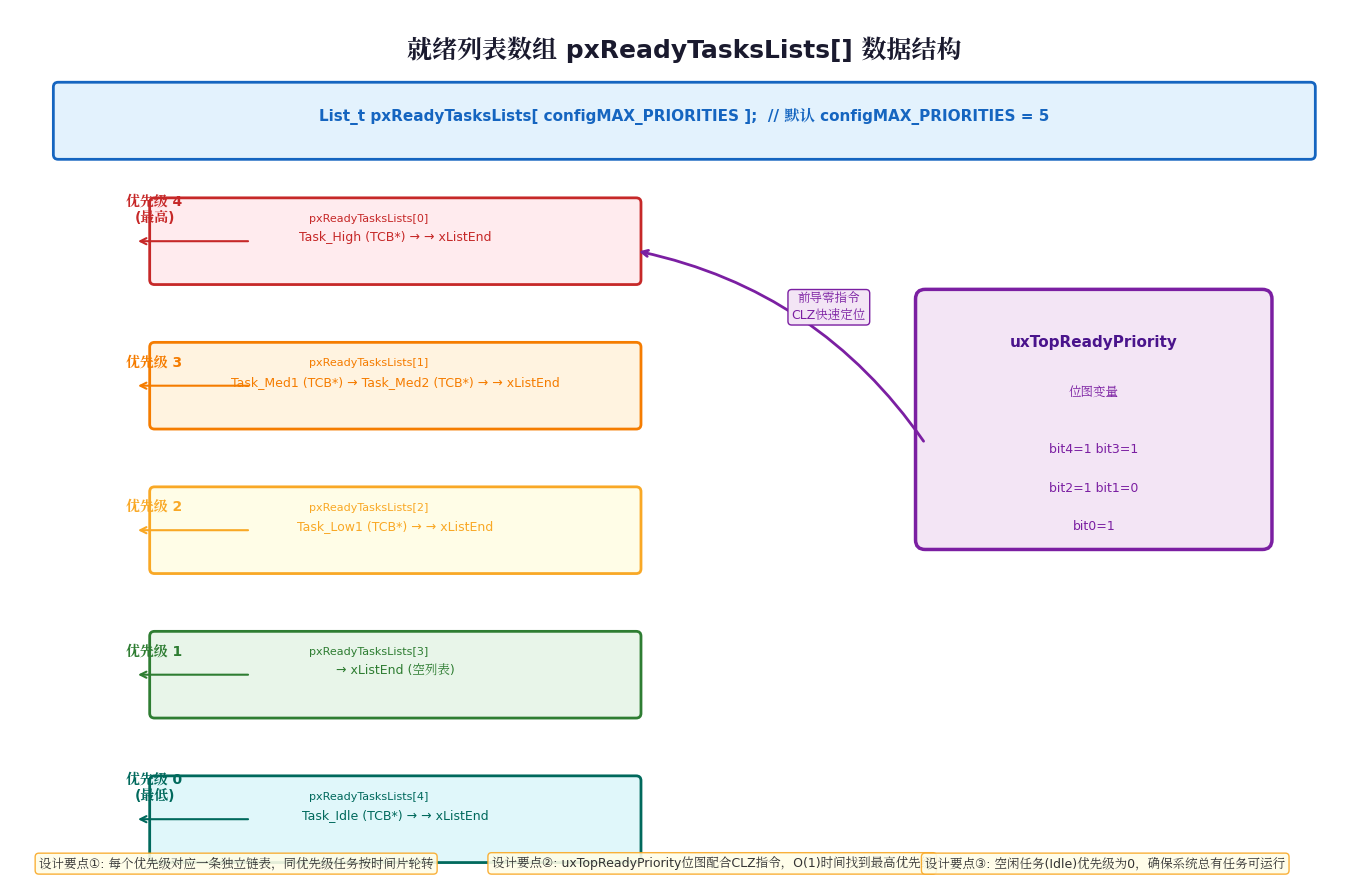
3.1 数据结构定义
/* FreeRTOS内核全局变量:就绪列表数组 */
PRIVILEGED_DATA static List_t pxReadyTasksLists[ configMAX_PRIORITIES ];
这是一个List_t类型的数组,数组长度由configMAX_PRIORITIES决定(默认32,可配置)。每个数组元素是一条独立的双向链表,管理对应优先级下的所有就绪任务。
设计精妙之处:
- 不同优先级天然分层,结构清晰
- 同优先级任务按时间片轮转调度(FIFO顺序)
- 通过
uxTopReadyPriority位图配合CLZ指令,O(1)时间定位最高优先级
3.2 任务插入就绪列表
当任务创建或从阻塞态恢复时,通过prvAddTaskToReadyList()宏插入就绪列表:
#define prvAddTaskToReadyList( pxTCB ) \
traceMOVED_TASK_TO_READY_STATE( pxTCB ); \
taskRECORD_READY_PRIORITY( ( pxTCB )->uxPriority ); \
vListInsertEnd( &( pxReadyTasksLists[ ( pxTCB )->uxPriority ] ), &( ( pxTCB )->xStateListItem ) );
关键步骤:
- 记录就绪优先级:将
uxTopReadyPriority的对应位设为1 - 插入链表尾部:使用
vListInsertEnd()保证同优先级FIFO顺序
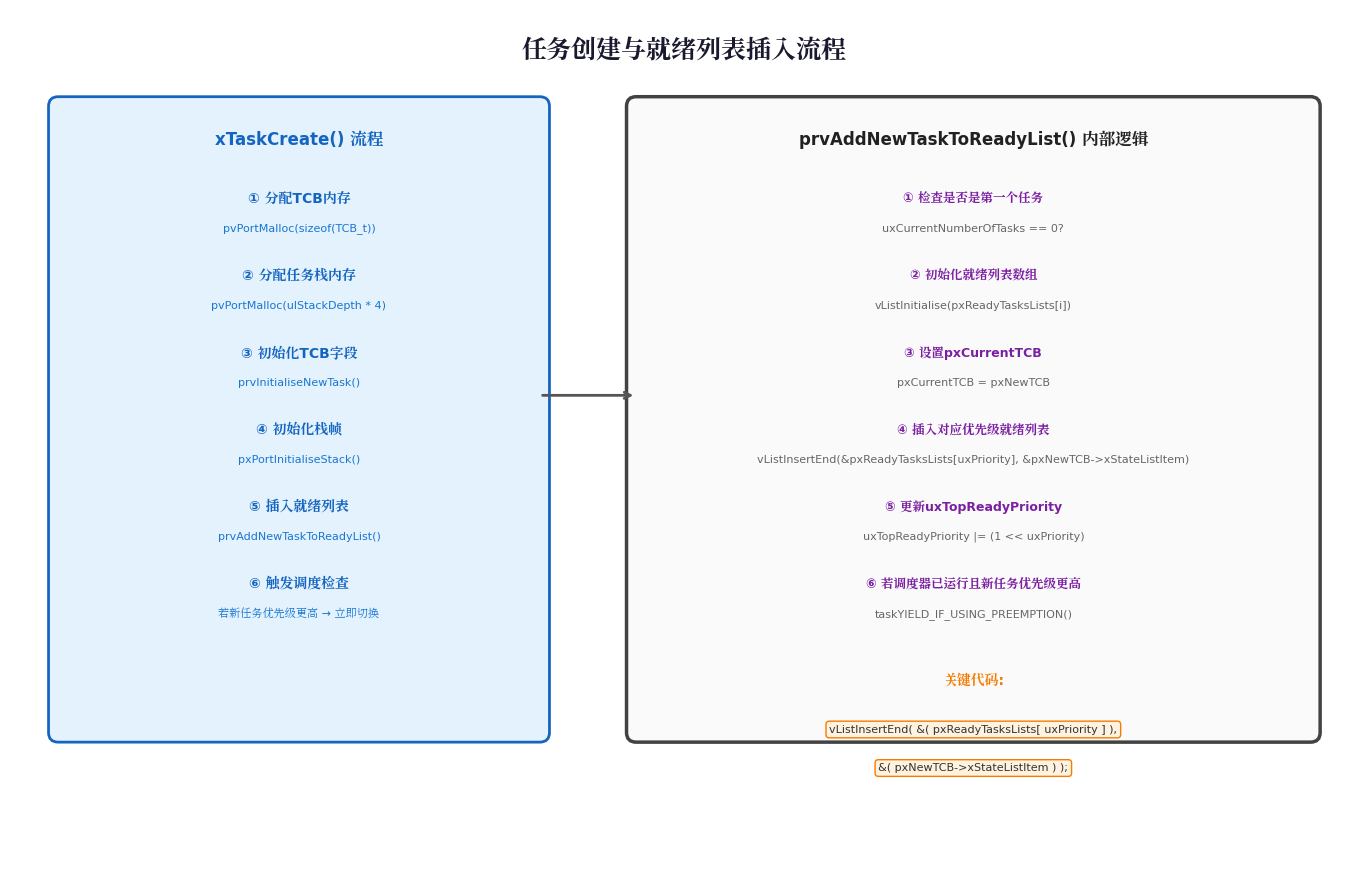
3.3 源码级任务创建流程
/* xTaskCreate() → prvAddNewTaskToReadyList() 核心逻辑 */
static void prvAddNewTaskToReadyList( TCB_t * pxNewTCB )
{
/* 进入临界区,防止调度被打断 */
taskENTER_CRITICAL();
{
/* 递增当前任务数量 */
uxCurrentNumberOfTasks++;
/* 如果是第一个创建的任务 */
if( pxCurrentTCB == NULL )
{
/* 初始化就绪列表数组的所有链表 */
for( UBaseType_t uxPriority = 0; uxPriority < configMAX_PRIORITIES; uxPriority++ )
{
vListInitialise( &( pxReadyTasksLists[ uxPriority ] ) );
}
/* 新任务成为当前任务 */
pxCurrentTCB = pxNewTCB;
/* 启动调度器时,此任务会自动运行 */
if( uxCurrentNumberOfTasks == ( UBaseType_t ) 1 )
{
/* 初始化延时列表 */
vListInitialise( &xDelayedTaskList1 );
vListInitialise( &xDelayedTaskList2 );
}
}
else
{
/* 调度器已运行,新任务插入就绪列表 */
if( xSchedulerRunning == pdFALSE )
{
/* 调度器未运行时,若新任务优先级更高,直接设为当前任务 */
if( pxCurrentTCB->uxPriority <= pxNewTCB->uxPriority )
{
pxCurrentTCB = pxNewTCB;
}
}
else
{
/* 调度器已运行时,若新任务优先级更高,立即触发调度 */
if( pxCurrentTCB->uxPriority < pxNewTCB->uxPriority )
{
taskYIELD_IF_USING_PREEMPTION();
}
}
}
/* 将新任务插入对应优先级的就绪列表 */
prvAddTaskToReadyList( pxNewTCB );
}
taskEXIT_CRITICAL();
}
四、任务控制块TCB结构
4.1 TCB关键字段
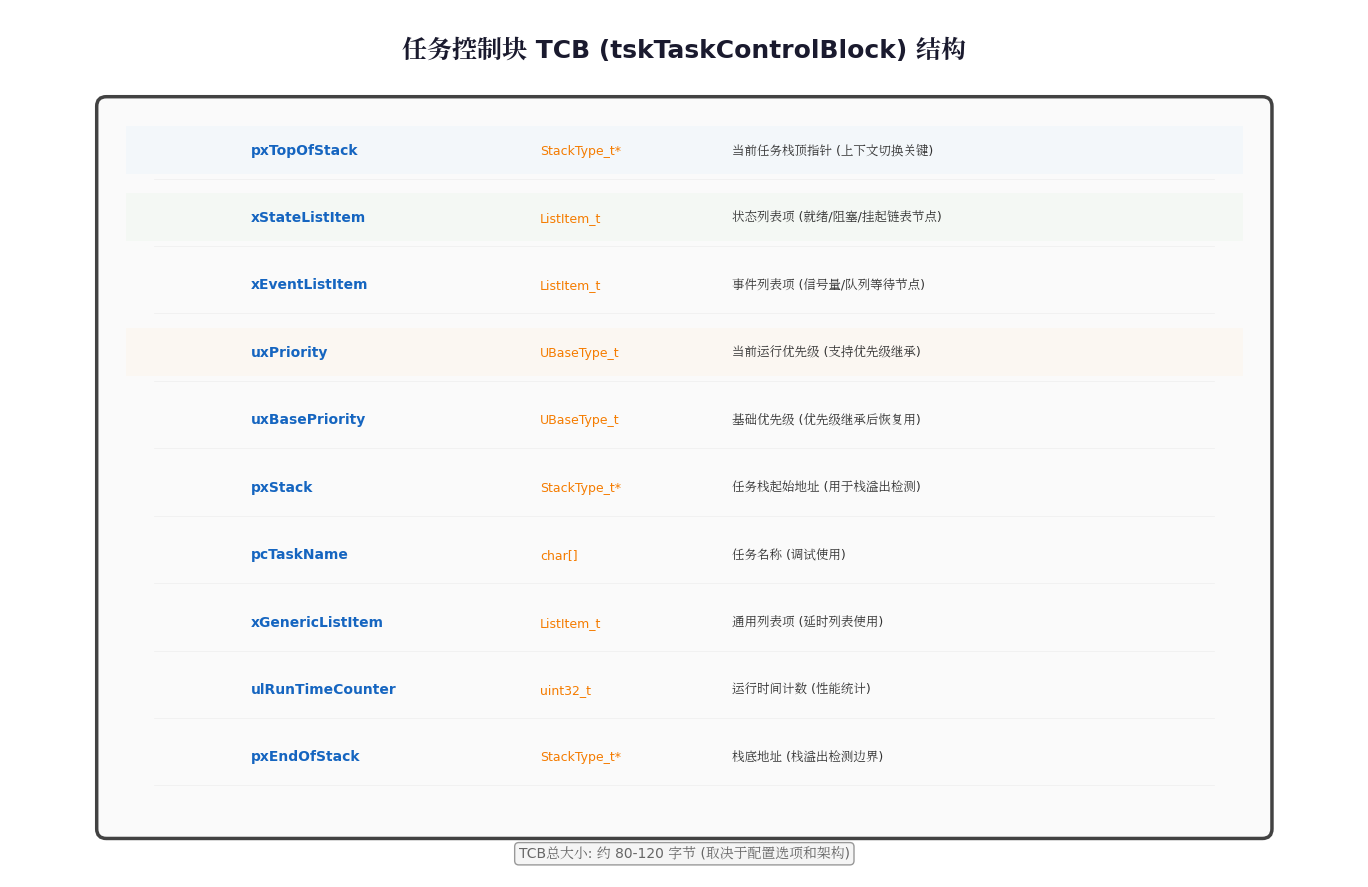
/* FreeRTOS任务控制块结构(简化版) */
typedef struct tskTaskControlBlock
{
volatile StackType_t * pxTopOfStack; /* 当前任务栈顶指针 - 上下文切换关键 */
ListItem_t xStateListItem; /* 状态列表项 - 用于就绪/阻塞/挂起链表 */
ListItem_t xEventListItem; /* 事件列表项 - 用于信号量/队列等待 */
UBaseType_t uxPriority; /* 当前运行优先级(支持优先级继承) */
UBaseType_t uxBasePriority; /* 基础优先级(优先级继承后恢复用) */
StackType_t * pxStack; /* 任务栈起始地址 - 栈溢出检测 */
char pcTaskName[ configMAX_TASK_NAME_LEN ]; /* 任务名称 - 调试使用 */
#if ( configUSE_MUTEXES == 1 )
UBaseType_t uxMutexesHeld; /* 持有的互斥锁数量 */
#endif
#if ( configGENERATE_RUN_TIME_STATS == 1 )
uint32_t ulRunTimeCounter; /* 运行时间计数 - 性能统计 */
#endif
} tskTCB;
pxTopOfStack是上下文切换的核心字段:它指向任务栈中保存的寄存器上下文起始位置。当任务被切换出去时,R4-R11被压入栈中,pxTopOfStack更新为新的栈顶;当任务被切换回来时,从pxTopOfStack指向的位置恢复R4-R11。
五、优先级抢占机制详解
5.1 抢占式调度时序
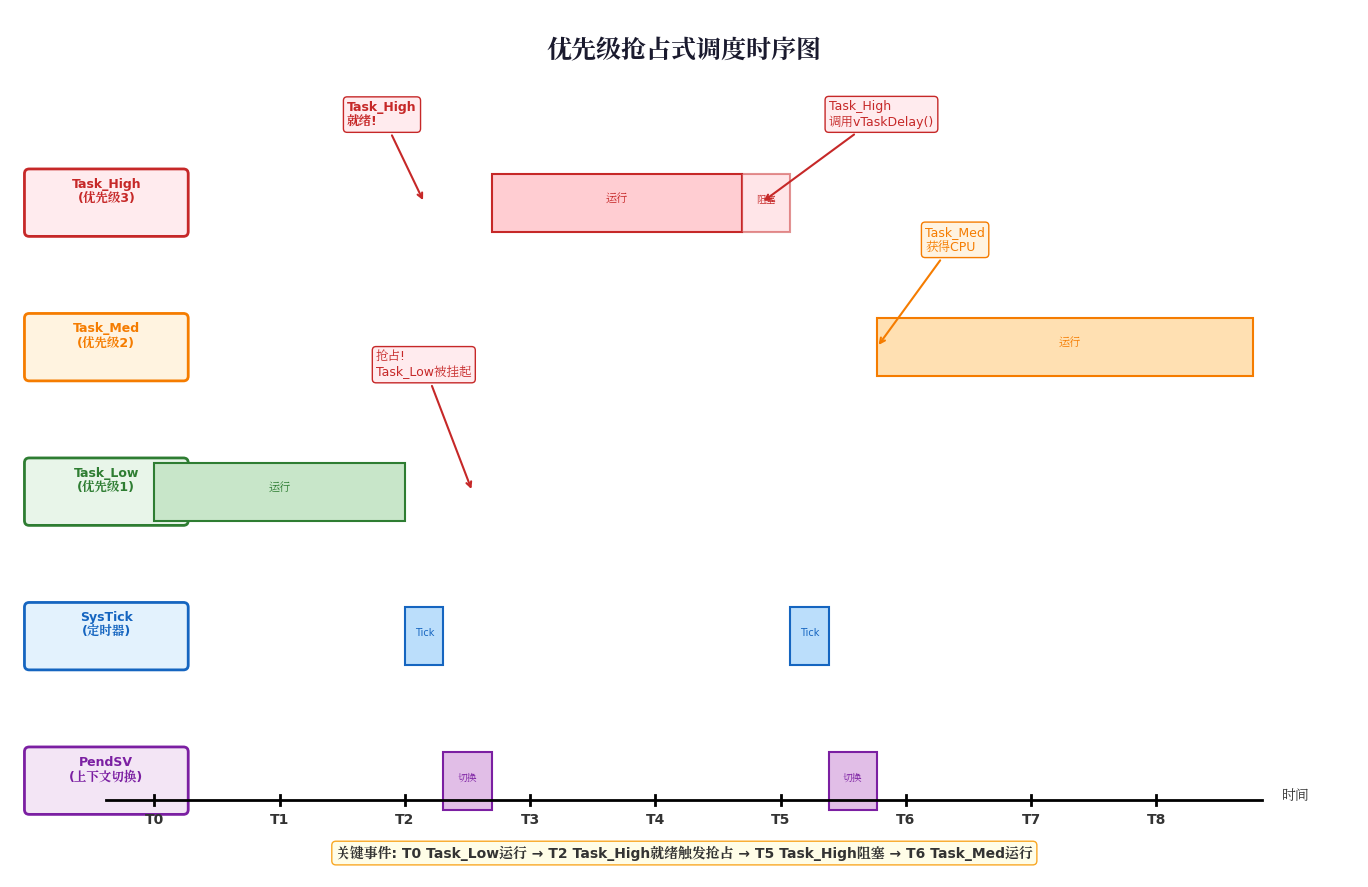
场景描述:
- T0时刻:Task_Low(优先级1)正在运行
- T2时刻:Task_High(优先级3)就绪(如中断中释放信号量)
- T2时刻:SysTick中断触发,检测到高优先级任务就绪
- T2时刻:PendSV挂起,延迟执行上下文切换
- T3时刻:Task_High开始运行,Task_Low被挂起到就绪列表
- T5时刻:Task_High调用vTaskDelay()进入阻塞态
- T6时刻:Task_Med(优先级2)获得CPU
关键设计:PendSV延迟切换
FreeRTOS没有在中断服务函数中直接切换任务,而是采用延迟切换策略:
- SysTick中断只设置
xYieldPending = pdTRUE - 真正的切换在PendSV异常中执行
- PendSV优先级设为最低,确保所有高优先级中断处理完毕后才执行切换
这种设计的优势:
- 避免中断嵌套复杂化:切换操作不会打断其他ISR
- 保证中断响应确定性:高优先级中断不会被切换操作延迟
- 简化临界区管理:切换时只需屏蔽到
configMAX_SYSCALL_INTERRUPT_PRIORITY
5.2 抢占发生的条件
优先级抢占并非"优先级高就一定立即执行",需要满足以下条件:
/* 抢占发生的必要条件 */
1. 调度器已启动 (xSchedulerRunning == pdTRUE)
2. 调度器未挂起 (uxSchedulerSuspended == pdFALSE)
3. 新任务优先级 > 当前运行任务优先级
4. 当前不在临界区内 (uxCriticalNesting == 0)
5. 未屏蔽中断 (BASEPRI == 0)
常见误区:在临界区内创建高优先级任务不会立即抢占,直到退出临界区后才可能触发调度。
六、vTaskSwitchContext源码剖析
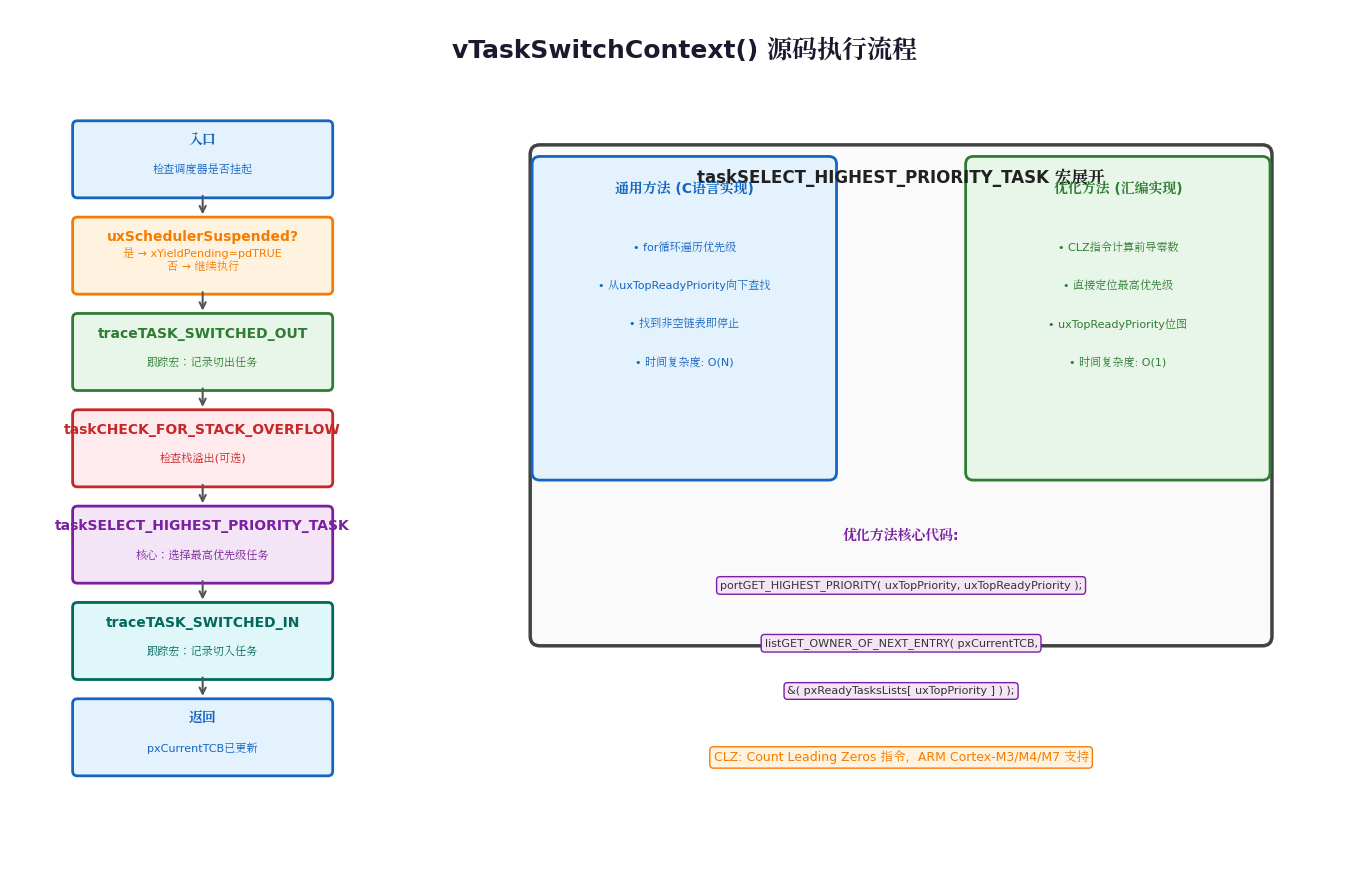
6.1 函数整体流程
/* tasks.c 中的核心调度函数 */
void vTaskSwitchContext( void )
{
/* 检查调度器是否被挂起 */
if( uxSchedulerSuspended != ( UBaseType_t ) pdFALSE )
{
/* 调度器挂起期间,不允许上下文切换 */
xYieldPending = pdTRUE;
}
else
{
xYieldPending = pdFALSE;
/* 跟踪宏:记录任务切出(用于调试/分析) */
traceTASK_SWITCHED_OUT();
#if ( configGENERATE_RUN_TIME_STATS == 1 )
{
/* 更新当前任务的运行时间统计 */
#ifdef portALT_GET_RUN_TIME_COUNTER_VALUE
portALT_GET_RUN_TIME_COUNTER_VALUE( ulTotalRunTime );
#else
ulTotalRunTime = portGET_RUN_TIME_COUNTER_VALUE();
#endif
if( ulTotalRunTime > ulTaskSwitchedInTime )
{
pxCurrentTCB->ulRunTimeCounter += ( ulTotalRunTime - ulTaskSwitchedInTime );
}
ulTaskSwitchedInTime = ulTotalRunTime;
}
#endif
/* 检查栈溢出(可选功能) */
taskCHECK_FOR_STACK_OVERFLOW();
/* 核心:选择最高优先级的就绪任务 */
taskSELECT_HIGHEST_PRIORITY_TASK();
/* 跟踪宏:记录任务切入 */
traceTASK_SWITCHED_IN();
#if ( configUSE_NEWLIB_REENTRANT == 1 )
{
/* 更新newlib的reent结构指针 */
_impure_ptr = &( pxCurrentTCB->xNewLib_reent );
}
#endif
}
}
6.2 taskSELECT_HIGHEST_PRIORITY_TASK宏
这是调度器最核心的算法,有两种实现方式:
通用方法(C语言,O(N)):
/* 通用方法:从最高优先级向下遍历查找 */
#define taskSELECT_HIGHEST_PRIORITY_TASK() \
{ \
UBaseType_t uxTopPriority = configMAX_PRIORITIES - 1; \
\
/* 从最高优先级开始向下查找非空链表 */ \
while( listLIST_IS_EMPTY( &( pxReadyTasksLists[ uxTopPriority ] ) ) ) \
{ \
configASSERT( uxTopPriority ); \
uxTopPriority--; \
} \
\
/* 获取该优先级链表中的下一个任务 */ \
listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopPriority ] ) ); \
}
优化方法(汇编CLZ指令,O(1)):
/* ARM Cortex-M3/M4/M7 优化方法 */
#define taskSELECT_HIGHEST_PRIORITY_TASK() \
{ \
UBaseType_t uxTopPriority; \
\
/* CLZ指令计算uxTopReadyPriority的前导零个数 */ \
portGET_HIGHEST_PRIORITY( uxTopPriority, uxTopReadyPriority ); \
\
/* 直接索引到最高优先级的就绪列表 */ \
listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopPriority ] ) ); \
}
CLZ指令原理:
uxTopReadyPriority = 0b0000 0000 0000 0000 0000 0000 0001 1010 (优先级1,3,4有就绪任务)
CLZ(uxTopReadyPriority) = 27 (前导27个零)
uxTopPriority = 31 - 27 = 4 (最高就绪优先级为4)
通过硬件指令,将遍历查找优化为单次计算,调度延迟从O(N)降至O(1)。
七、PendSV_Handler上下文切换
7.1 上下文切换的"瞬间移动"
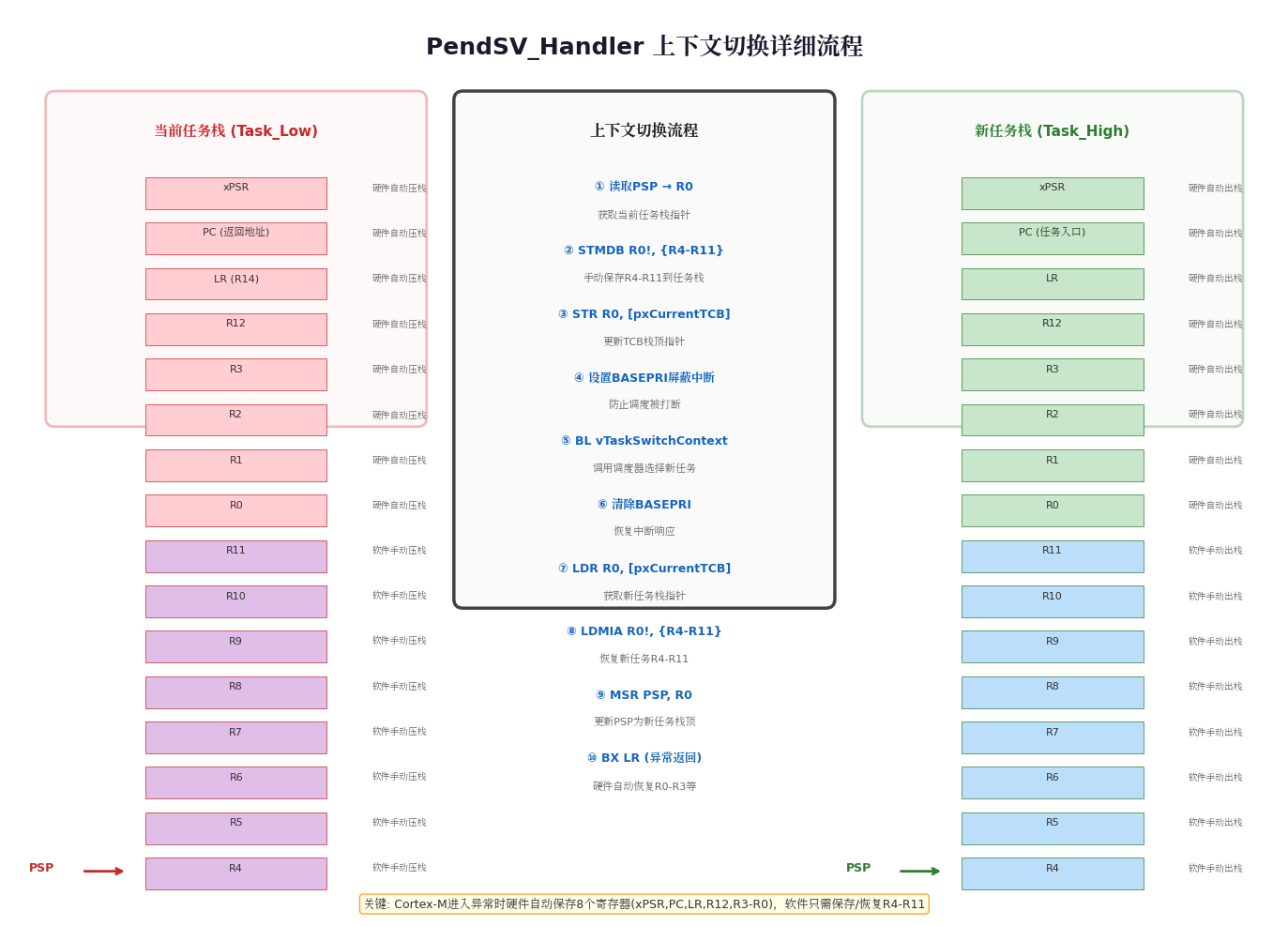
上下文切换是RTOS最精妙的操作——在纳秒级时间内,CPU从一个任务的执行现场"瞬移"到另一个任务。这依赖于Cortex-M内核的双堆栈机制和硬件自动保存特性。
Cortex-M双堆栈设计:
- MSP (Main Stack Pointer):中断服务程序使用,由内核维护
- PSP (Process Stack Pointer):任务代码使用,每个任务独立
异常进入时的硬件自动保存:
当任何中断/异常发生时,Cortex-M硬件自动将以下8个寄存器压入当前堆栈(使用PSP,因为是任务上下文):
xPSR, PC, LR, R12, R3, R2, R1, R0 (共32字节)
软件需手动保存/恢复:
R4, R5, R6, R7, R8, R9, R10, R11 (共32字节)
7.2 PendSV_Handler汇编源码
__asm void xPortPendSVHandler( void )
{
extern uxCriticalNesting;
extern pxCurrentTCB;
extern vTaskSwitchContext;
PRESERVE8
/* ========== 步骤①:获取当前任务的PSP ========== */
mrs r0, psp /* 将进程堆栈指针PSP读取到R0 */
isb /* 指令同步屏障,确保读取完成 */
/* ========== 步骤②:保存当前任务的上下文 ========== */
ldr r3, =pxCurrentTCB /* R3 = &pxCurrentTCB */
ldr r2, [r3] /* R2 = pxCurrentTCB (当前任务的TCB指针) */
/* 手动保存R4-R11到当前任务栈(STMDB = Store Multiple Decrement Before) */
stmdb r0!, {r4-r11} /* R0递减,依次压入R4-R11 */
/* 更新TCB中的栈顶指针:pxCurrentTCB->pxTopOfStack = R0 */
str r0, [r2]
/* ========== 步骤③:调用调度器选择新任务 ========== */
/* 保存R3和LR到主栈(MSP),因为即将调用C函数 */
stmdb sp!, {r3, r14}
/* 屏蔽优先级低于configMAX_SYSCALL_INTERRUPT_PRIORITY的中断 */
mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY
msr basepri, r0
dsb
isb
/* 调用vTaskSwitchContext(),执行调度算法 */
bl vTaskSwitchContext
/* 清除BASEPRI,恢复所有中断 */
mov r0, #0
msr basepri, r0
/* 恢复R3和LR */
ldmia sp!, {r3, r14}
/* ========== 步骤④:恢复新任务的上下文 ========== */
/* R3仍然指向pxCurrentTCB,但此时它已指向新任务 */
ldr r1, [r3] /* R1 = pxCurrentTCB (新任务的TCB指针) */
ldr r0, [r1] /* R0 = pxCurrentTCB->pxTopOfStack (新任务的栈顶) */
/* 手动恢复R4-R11(LDMIA = Load Multiple Increment After) */
ldmia r0!, {r4-r11}
/* 更新PSP为新任务的栈顶 */
msr psp, r0
isb
/* ========== 步骤⑤:异常返回,硬件自动恢复剩余寄存器 ========== */
bx r14 /* 使用LR中的EXC_RETURN值返回 */
nop
}
7.3 上下文切换的完整数据流
Task_Low运行中
↓
SysTick中断发生
↓
硬件自动保存:xPSR,PC,LR,R12,R3-R0 → Task_Low的栈
↓
进入PendSV_Handler
↓
软件手动保存:R4-R11 → Task_Low的栈
↓
更新pxCurrentTCB->pxTopOfStack = 当前栈顶
↓
调用vTaskSwitchContext():pxCurrentTCB指向Task_High
↓
从pxCurrentTCB->pxTopOfStack读取新栈顶
↓
软件手动恢复:R4-R11 ← Task_High的栈
↓
更新PSP = 新栈顶
↓
bx LR异常返回
↓
硬件自动恢复:xPSR,PC,LR,R12,R3-R0 ← Task_High的栈
↓
Task_High开始执行(仿佛从未中断过)
八、性能对比与关键指标
8.1 调度性能数据
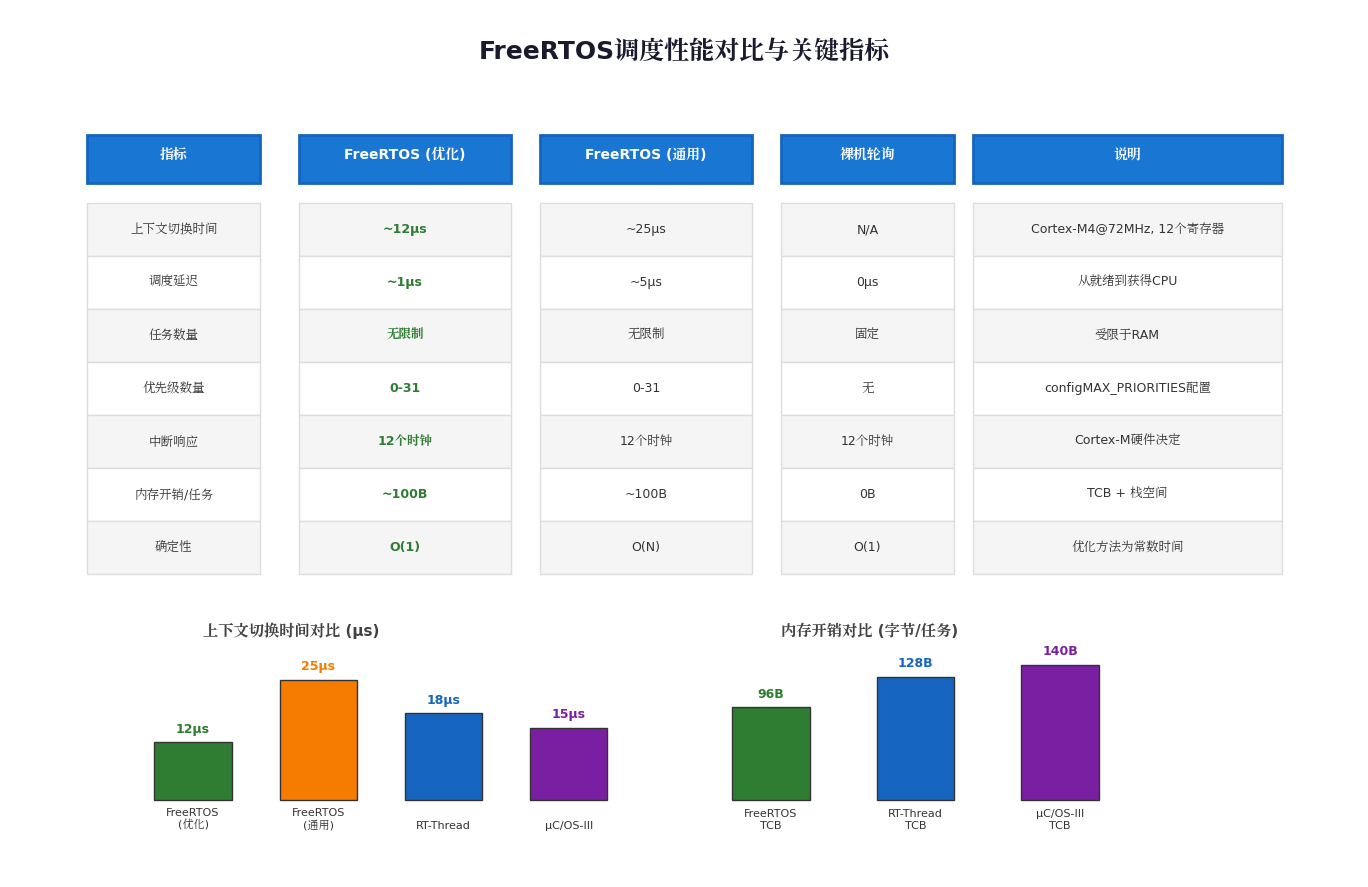
| 指标 | FreeRTOS(优化) | FreeRTOS(通用) | 说明 |
|---|---|---|---|
| 上下文切换时间 | ~12μs | ~25μs | Cortex-M4@72MHz,12个寄存器 |
| 调度延迟 | ~1μs | ~5μs | 从就绪到获得CPU |
| 中断响应 | 12个时钟 | 12个时钟 | Cortex-M硬件决定,RTOS不增加延迟 |
| 内存开销/任务 | ~100B | ~100B | TCB结构体大小 |
| 调度算法复杂度 | O(1) | O(N) | 优化方法使用CLZ指令 |
8.2 与其他RTOS对比
| RTOS | 切换时间 | TCB大小 | 调度算法 | 特点 |
|---|---|---|---|---|
| FreeRTOS | 12μs | 96B | 优先级抢占+时间片 | 开源、轻量、文档丰富 |
| RT-Thread | 18μs | 128B | 优先级抢占+时间片 | 国产、组件丰富 |
| μC/OS-III | 15μs | 140B | 优先级抢占 | 商业授权、确定性高 |
| ThreadX | 8μs | 80B | 优先级抢占 | 微软维护、通过安全认证 |
FreeRTOS的优势在于极低的内存占用和成熟的生态,而优化后的O(1)调度算法使其在实时性上不输商业RTOS。
九、常见问题与调试技巧
问题1:高优先级任务不执行
症状:创建了优先级3的任务,但优先级1的任务一直在运行。
排查:
- 检查
configMAX_PRIORITIES是否配置正确(必须 > 最高任务优先级) - 确认高优先级任务确实进入了就绪态(未被阻塞或挂起)
- 检查是否在临界区内创建了任务(抢占被延迟)
- 使用
uxTaskPriorityGet()验证实际优先级
问题2:上下文切换后HardFault
症状:任务切换时进入HardFault_Handler。
排查:
- 检查任务栈是否溢出(使用
uxTaskGetStackHighWaterMark()) - 确认栈初始化时填充了已知模式(如0xA5A5A5A5)
- 检查中断优先级配置:PendSV和SysTick必须设为最低优先级
- 验证
configKERNEL_INTERRUPT_PRIORITY与芯片优先级位数匹配
问题3:调度延迟过大
症状:高优先级任务就绪后,响应时间不稳定。
排查:
- 检查是否有长时间关闭中断的操作(如
taskENTER_CRITICAL()滥用) - 确认
configMAX_SYSCALL_INTERRUPT_PRIORITY设置合理 - 使用
traceTASK_SWITCHED_OUT/IN宏测量实际切换时间 - 考虑使用中断安全版本的API(以
FromISR结尾的函数)
问题4:同优先级任务不轮转
症状:两个优先级2的任务,只有一个在执行。
排查:
- 确认
configUSE_TIME_SLICING设为1(启用时间片) - 检查
configTICK_RATE_HZ是否过低(时间片太长) - 确认任务没有主动放弃CPU(如未调用
taskYIELD())
十、实战:自定义调度追踪
通过FreeRTOS的跟踪宏,可以实现零侵入式的调度分析:
/* FreeRTOSConfig.h 中启用跟踪 */
#define configUSE_TRACE_FACILITY 1
/* 自定义跟踪宏实现 */
#define traceTASK_SWITCHED_OUT() do { \
GPIO_SetBits(DEBUG_PORT, DEBUG_PIN_TASK_SWITCH); \
g_taskSwitchCount++; \
g_lastSwitchTime = xTaskGetTickCountFromISR(); \
} while(0)
#define traceTASK_SWITCHED_IN() do { \
GPIO_ResetBits(DEBUG_PORT, DEBUG_PIN_TASK_SWITCH); \
g_currentTask = pxCurrentTCB->pcTaskName; \
} while(0)
/* 运行时统计信息输出 */
void PrintSchedulerStats(void)
{
TaskStatus_t *pxTaskStatusArray;
volatile UBaseType_t uxArraySize, uxTaskCount;
uint32_t ulTotalRunTime, ulStatsAsPercentage;
uxArraySize = uxTaskGetNumberOfTasks();
pxTaskStatusArray = pvPortMalloc(uxArraySize * sizeof(TaskStatus_t));
if(pxTaskStatusArray != NULL)
{
uxTaskCount = uxTaskGetSystemState(pxTaskStatusArray, uxArraySize, &ulTotalRunTime);
printf(\"Task Name\\t\\tStatus\\tPrio\\tStack\\tCPU%%\\n\");
for(UBaseType_t i = 0; i < uxTaskCount; i++)
{
ulStatsAsPercentage = pxTaskStatusArray[i].ulRunTimeCounter * 100 / ulTotalRunTime;
printf(\"%-16s\\t%c\\t%u\\t%u\\t%u%%\\n\",
pxTaskStatusArray[i].pcTaskName,
pxTaskStatusArray[i].eCurrentState == eRunning ? 'R' :
(pxTaskStatusArray[i].eCurrentState == eReady ? 'D' : 'B'),
pxTaskStatusArray[i].uxCurrentPriority,
pxTaskStatusArray[i].usStackHighWaterMark,
ulStatsAsPercentage);
}
vPortFree(pxTaskStatusArray);
}
}
十一、总结与进阶方向
本文从源码层面完整剖析了FreeRTOS的优先级抢占式调度机制:
-
就绪列表数组:
pxReadyTasksLists[]按优先级分层管理任务,配合uxTopReadyPriority位图实现O(1)查找 -
TCB任务控制块:
pxTopOfStack是上下文切换的核心,xStateListItem连接任务到各种状态链表 -
vTaskSwitchContext():调度器心脏,通过
taskSELECT_HIGHEST_PRIORITY_TASK选择下一个运行任务 -
PendSV_Handler:利用Cortex-M硬件自动保存8个寄存器的特性,软件只需处理R4-R11,实现高效切换
-
优先级抢占:满足"调度器运行+未挂起+优先级更高+非临界区"条件时触发,通过延迟切换保证中断响应确定性
进阶学习方向:
- 时间片轮转:同优先级任务的FIFO调度与
vTaskDelay(1)的协作 - 优先级继承:互斥锁引发的优先级提升与恢复机制
- 调度器挂起:
vTaskSuspendAll()的实现与嵌套计数 - Tickless模式:低功耗场景下的动态Tick间隔调整
- SMP多核:FreeRTOS SMP分支的多核调度策略
转载自:https://blog.csdn.net/u014727709/article/details/162464326
欢迎 👍点赞✍评论⭐收藏,欢迎指正

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐
 3
3 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)