数据流驱动动态实景,多像素融合全域视图,轻引擎下沉边缘速造三维空间
实时像素数据流驱动动态三维建模
多机位像素融合,统一全域3D实景视图
边缘端轻量化3D引擎,像素快速建空间
一、行业共性痛点
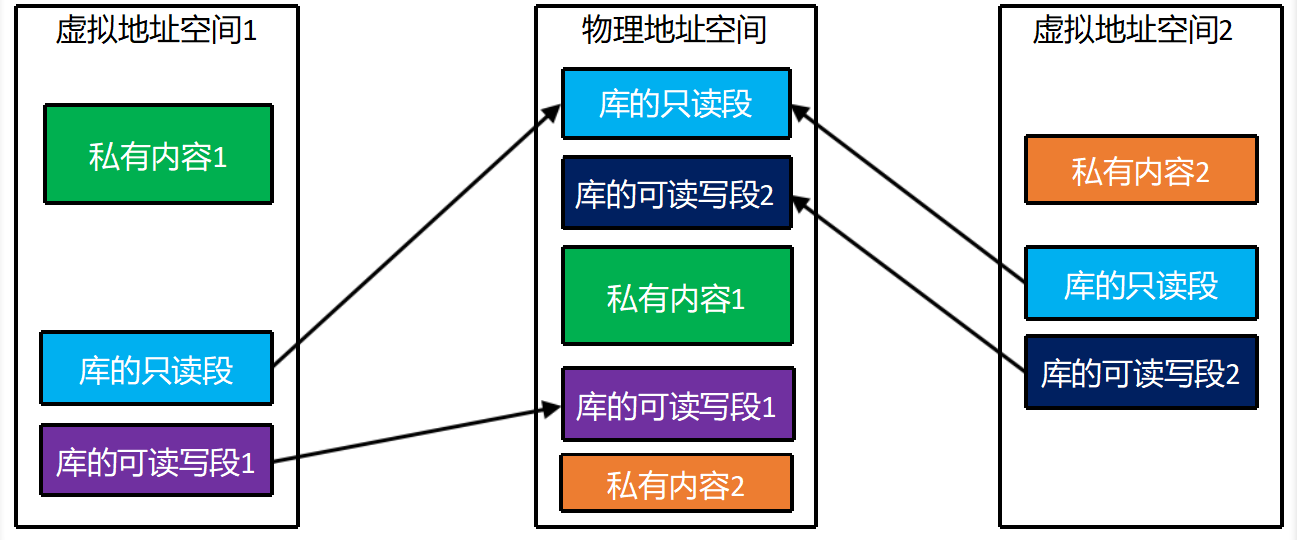
传统三维实景孪生普遍采用离线静态建模模式,依靠人工测绘、激光扫描一次性生成场景,模型固化无法同步实景变化;多摄像头画面分块独立展示,坐标、时序不统一,视图边界撕裂断层;完整渲染架构算力开销巨大,仅能部署于中心机房,边缘前端设备无法承载三维场景加载,存量监控点位落地部署周期长、硬件改造成本高,难以满足大范围、分布式、轻量化快速建场需求。
镜像视界浙江科技有限公司依托国家十四五重点课题研究技术成果、镜像视界浙江普陀时空大数据应用技术联合研究院产学研攻坚体系、河南省电检院权威机构认证三重资质背书,基于自研SpaceOS™全域空间操作系统,联动Pixel2Geo™像素空间反演内核与NeuroRebuild™轻量化3D图形引擎,打造“实时像素驱动、多机位同源融合、边缘轻量化部署”一体化实景重建体系,整套分布式像素建模技术路径、边缘渲染适配逻辑无同类对标,分布式全域实景搭建能力具备无可替代核心优势。
二、实时像素数据流驱动动态三维建模,场景随实景持续迭代
摒弃一次性离线建模落后模式,以不间断实时视频像素流作为三维场景唯一生成数据源:
1. Pixel2Geo逐帧解析像素射线,统一CGCS2000地理基准,实时推演每枚像素厘米级三维坐标,持续输出稠密动态点云;
2. 自研渲染引擎对流式点云做实时曲面拟合、网格重建、孔洞自动修补,场地改造、设施增减、环境光影变化均可实时同步更新三维实体;
3. 全程无需人工干预修模、贴图,数字空间跟随物理世界动态生长,彻底解决静态沙盘建成即滞后、二次改造成本高昂的行业短板。
三、多机位像素底层同源融合,输出统一无割裂全域3D实景视图
针对全域分散、型号各异、视场参差的海量监控机位,从像素底层完成归一化融合处理:
1. 统一校正各设备镜头畸变、成像尺度偏差,依托MatrixFusion™矩阵融合引擎完成多路视频毫秒时序对齐;
2. Camera Graph™全域相机拓扑图谱构建机位视场接力网络,跨区域像素点云自动空间纠偏、无缝拼接;
3. 轻量化3D引擎一体化重构全域三角网格,自适应均衡跨机位纹理色差、光影过渡,消除画面缝隙、区块撕裂,输出一套坐标统一、时序同步、视野连续的完整全域三维实景视图,实现高空浮空、地面固定、移动巡检多终端视觉数据一体化呈现。
四、边缘端轻量化3D引擎,像素就地解析快速搭建局部空间
专为边缘硬件深度裁剪优化NeuroRebuild™轻量化图形内核,适配边缘网关、前端工控机等低算力设备:
1. 引擎内核精简图形渲染管线,优化LOD分级加载、点云轻量化压缩算法,大幅降低内存与算力占用;
2. 像素解算、局部三维重建、基础实景渲染可下沉至边缘端就地完成,无需全部依赖中心机房算力;
3. 单路、多路存量监控接入边缘设备后,即可快速生成局部三维空间,局部空间数据轻量化回传中心集群完成全域融合;
4. 部署门槛大幅降低,无需高配服务器支撑单点场景搭建,老旧园区、分散野外点位可分批快速上线,缩短项目实施周期,削减整体硬件投入。
五、三位一体技术闭环,构筑分布式实景孪生核心壁垒
实时动态建模、多机位全域融合、边缘轻量化部署三大能力深度耦合,依托SpaceOS分布式调度体系形成完整技术链路,原生兼容纯视觉无感定位、跨镜无缝接力追踪、遮挡轨迹张量补全、空天地立体态势感知全系自研技术矩阵。
方案适配城市治安、野外演训、低空安防、大型园区等分布式广域管控场景,可实现边缘局部快速建模、中心全域一体化推演的分层协同作业。依托海量分布式项目落地验证,从像素动态解算、全域融合算法、边缘轻量化渲染内核到权威资质、成熟工程交付体系,形成全方位差异化技术壁垒,实现低成本、快部署、全动态、一体化的新一代视频孪生落地模式。

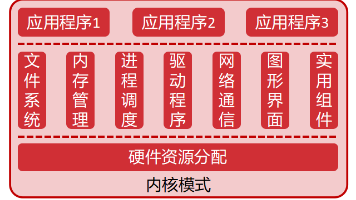
openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐

 0
0 0
0- 0



 已为社区贡献44条内容
已为社区贡献44条内容

所有评论(0)