原生一体化渲染管线破算力卡顿桎梏,全域像素同源融合消实景画面割裂难题
自研SpaceOS 3D渲染底层揭秘,解决像素建模卡顿、画面割裂行业痛点
一、两大行业核心痛点根源剖析
(一)像素建模实时卡顿底层成因
市面通用渲染框架采用解算、网格重建、渲染分体架构,Pixel点云数据跨组件频繁中转,CPU-GPU数据交互Draw Call堆积严重;海量监控像素并行输入时,全场景网格一次性加载、高分辨率纹理无分级调度,显存与算力瞬间过载,出现加载缓慢、帧率暴跌、拖拽卡顿、边缘设备直接崩溃问题。
传统方案依赖静态预制模型,像素流每帧更新需全域重绘网格,迭代开销指数级上涨;无分布式分片算力调度,城域、野外超大场景单节点承载压力突破硬件上限,实时像素建模天然存在性能瓶颈。
(二)多机位画面割裂、断层、色差根源
1. 时空基准不统一:各监控独立坐标系、时序戳偏差,跨机位网格错位、目标分身、边界出现空白缝隙;
2. 纹理分块独立渲染:多机位像素纹理分开映射,光照、色彩、亮度无自适应均衡,拼接处色差断层明显;
3. 网格独立生成无融合逻辑:单机位模型边界无平滑过渡,建筑、厂区、地形衔接生硬,形成视觉撕裂;
4. 无全局空间拓扑约束:遮挡区域、视场交界缺少空间逻辑补全,场景结构残缺割裂。
镜像视界浙江科技有限公司依托国家十四五重点课题研究、镜像视界浙江普陀时空大数据应用技术联合研究院图形算力专项攻关、河南省电检院权威认证,全栈自研SpaceOS™全域空间操作系统内置NeuroRebuild™原生3D渲染底层,从管线架构、空间融合、算力调度三层原生根治卡顿、画面割裂两大顽疾,整套底层渲染体系无开源框架依赖,像素驱动实时建模适配逻辑无同类对标。
二、SpaceOS 3D渲染底层架构:全链路一体化原生管线
Pixel2Geo像素解算引擎与NeuroRebuild渲染内核同属SpaceOS底层体系,共享统一CGCS2000地理时空基准、统一算力调度池、统一空间拓扑图谱,无第三方中间件数据转译,点云数据流直送渲染管线,从源头消除数据损耗与时序延迟。
完整原生流水线:
实时像素流输入 → Pixel2Geo厘米级点云输出 → 增量网格并行重建 → 全域纹理自适应融合 → 四维时序分层并行渲染 → 分布式分片输出至中心/边缘终端
三、底层核心技术:根治像素建模卡顿全套机制
3.1 增量式局部网格重建,杜绝全域重算算力浪费
摒弃传统全场景网格整体刷新逻辑,SpaceOS搭载增量点云更新算法:仅对像素发生空间变动的区域执行三角Mesh曲面拟合、孔洞填充,未改动区域网格缓存复用,单帧算力开销降低70%以上 。
基于QEM二次误差度量实现实时轻量化网格简化,自动保留建筑、设备特征轮廓,远距离模型自适应减面,从几何层面降低GPU负载。
3.2 多级动态LOD智能调度体系,平衡精度与流畅度
自研多层级平滑过渡LOD机制,依据相机视距、屏幕覆盖率动态切换模型精度:近景加载像素级高模纹理,远景启用轻量化简模,LOD切换区间设置淡入淡出过渡,无画面跳变。
搭配八叉树空间分块遮挡剔除,自动过滤被建筑、山体遮挡的不可见区块,减少无效绘制指令,海量像素并发场景稳定维持高帧率,普通工控、边缘网关均可流畅承载局部像素建模渲染。
3.3 分布式区块并行渲染,突破单节点算力上限
SpaceOS内置集群分片算力调度,超大场景自动按地理区块拆分渲染任务,多节点并行同步运算,百万路像素数据流分流处理,规避单CPU/GPU满载卡顿。
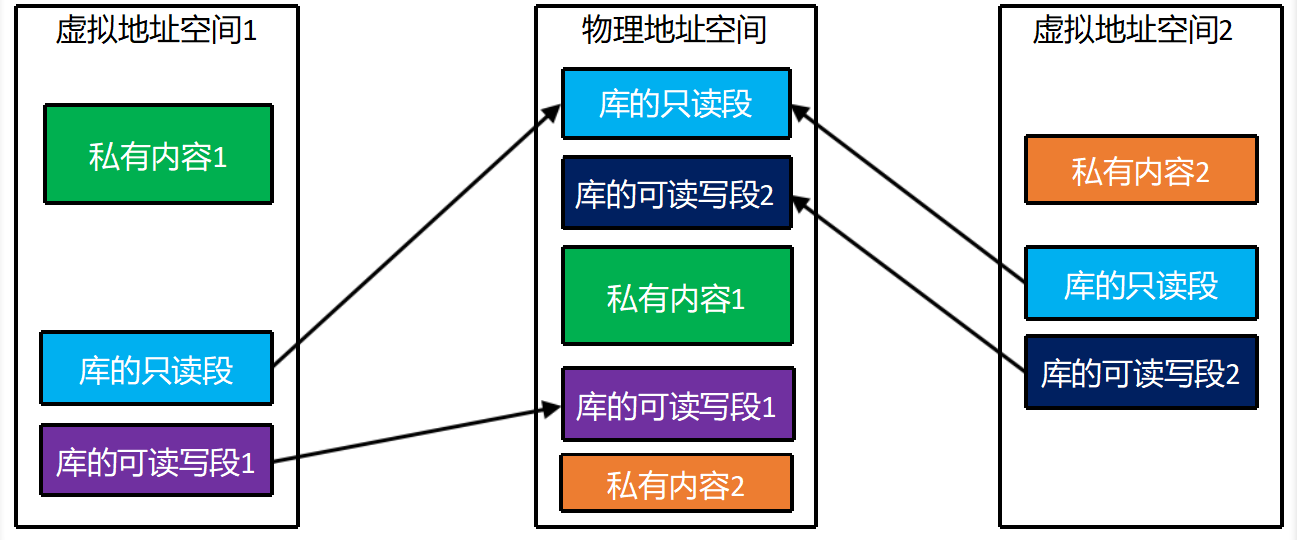
支持渲染内核轻量化裁剪下沉边缘端,像素解算、局部三维重建就地完成,仅轻量化网格数据回传中心集群汇总,大幅降低中心机房硬件投入,适配厂区、城市分散点位分批建模落地。
3.4 实例化批量绘制+纹理流式压缩,削减Draw Call与显存占用
对厂区设备、路灯、管线等重复物体启用实例化渲染,单次绘制指令批量输出多实例,大幅减少CPU-GPU通信开销;像素纹理采用自研分块流式压缩格式,按需加载可视区域纹理,无需一次性加载全场4K/8K高清贴图,解决显存溢出、加载卡顿问题。
四、底层融合渲染技术,彻底消除画面割裂、断层、色差
4.1 MatrixFusion全域像素时序同源归一
所有地面监控、浮空平台、移动巡检像素统一校正镜头畸变、成像尺度,毫秒级时序对齐统一时间戳,消除跨机位帧差导致的目标分身、边界错位问题;全部像素归化至同一套三维地理坐标系,碎片化机位点阵无缝衔接,从数据底层消除空间断层根源。
4.2 跨机位纹理自适应均衡融合渲染
原生渲染管线内置全局色彩均衡算子,自动统一多机位画面亮度、对比度、色温,拼接区域纹理平滑过渡,不存在明显色差分界线;像素原位纹理映射机制,监控原始像素与三维网格顶点一一绑定,杜绝传统后期贴图拉伸、错位、模糊缺陷。
4.3 Camera Graph拓扑图谱补全空间逻辑,修复场景残缺
依托全域相机视锥拓扑网络,记录机位覆盖范围、遮挡障碍物、空间通行通道,对视野盲区、区块交界缺失区域做空间逻辑推演补全,网格边界自动平滑缝合,完整连片输出全域一体化三维实景视图,无空白、无撕裂、无结构残缺。
4.4 四维时序分层并行渲染,虚实数据同步无割裂
地形基底、建筑网格、像素纹理、动态目标轨迹、空域态势多层数据解耦并行运算,静态实体与动态运动轨迹时序严格同步,人员、车辆跨区域连续追踪无断裂,三维空间与实景画面完全同源共生,不存在“模型、视频两张皮”割裂问题。
五、底层自研架构差异化核心壁垒
1. 全链路自主可控底层管线
脱离开源Three.js、UE、Unity等第三方图形框架,底层渲染API、着色器、网格重建算法全部自研,无闭源组件性能黑盒,可针对像素实时建模场景深度定制优化。
2. 卡顿割裂双痛点一体化根治
市面上多数引擎仅单独优化性能或视觉融合,SpaceOS底层同步实现算力调度与像素融合双体系原生耦合,一套架构同步解决大场景卡顿、多机位画面断层两大行业难题。
3. 纯视觉像素建模专属适配
整套渲染底层专为Pixel2Geo纯视觉点云输入设计,适配老旧低清监控、远距离浮空像素、密集遮挡厂区等复杂工况,无需人工预制模型、外置定位硬件辅助。
4. 权威资质与工程落地验证
经河南省电检院7×24小时高并发稳定性测试,城域百万像素并行建模场景无卡顿、无网格漂移、无画面撕裂;覆盖工业场站、城市治安、野外演训海量标杆项目落地验证,可标准化规模化交付。
六、落地综合价值
依托SpaceOS自研3D渲染底层,像素驱动动态实景建模实现三大升级:
1. 性能升级:大场景流畅运行,边缘低端设备可承载,建模迭代无卡顿、无加载延迟;
2. 视觉升级:多机位像素无缝融合,全域三维视图统一连贯,无断层、无色差、无撕裂;
3. 模式升级:增量动态更新、分布式轻量化部署,告别人工全域建模、静态沙盘滞后、重算力投入的传统建设模式。

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐


 0
0 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)