欧拉角顺序问题 + 万向锁效应
问题描述
我这里有个问题,就是我计算base_link到root的rpy,我通过gui调整r或者p,输出也只会变动r或者p,但是如果我r和p都改变了,那么计算的base_link到root的rpy中,rpy中y也变化了。
比如我在joint_state_publisher_gui设置的rp为0.704,0.620,但是通过tf计算的base_link到root的rpy为roll=0.807, pitch=0.458, yaw=0.433,为啥这里还有yaw的变换
<?xml version="1.0"?>
<robot xmlns:xacro="shturl.cc/sXZMd906f3wQULYYtEv" name="tilt_vehicle">
<!-- 材料定义,用于 RViz -->
<material name="gray">
<color rgba="0.6 0.6 0.6 1.0"/>
</material>
<material name="dark">
<color rgba="0.2 0.2 0.2 1.0"/>
</material>
<material name="red">
<color rgba="0.9 0.1 0.1 1.0"/>
</material>
<material name="green">
<color rgba="0.1 0.9 0.1 1.0"/>
</material>
<material name="blue">
<color rgba="0.1 0.1 0.9 1.0"/>
</material>
<!-- 新增坐标系标识颜色:黄色 -->
<material name="yellow">
<color rgba="1.0 1.0 0.0 1.0"/>
</material>
<!-- 车体尺寸 -->
<xacro:property name="body_len" value="3.5"/>
<xacro:property name="body_wid" value="2"/>
<xacro:property name="body_hei" value="0.2"/>
<!-- 倾角仪尺寸 -->
<xacro:property name="sen_len" value="0.12"/>
<xacro:property name="sen_wid" value="0.08"/>
<xacro:property name="sen_hei" value="0.05"/>
<!-- 标记点球半径 -->
<xacro:property name="marker_radius" value="0.03"/>
<!-- 新增:车体坐标系小方块尺寸 -->
<xacro:property name="origin_box_size" value="0.1 0.1 0.1"/>
<!-- 坐标系安装位置:车体前上方,按需修改xyz -->
<xacro:property name="origin_x" value="${body_len/2.0 - 0.1}"/>
<xacro:property name="origin_y" value="0.0"/>
<xacro:property name="origin_z" value="${body_hei/2.0 + 0.05}"/>
<link name="root">
<inertial>
<origin xyz="0 0 0"/>
<mass value="0.001"/>
<inertia ixx="1e-6" iyy="1e-6" izz="1e-6" ixy="0" ixz="0" iyz="0"/>
</inertial>
</link>
<link name="roll_link">
<inertial>
<origin xyz="0 0 0"/>
<mass value="0.001"/>
<inertia ixx="1e-6" iyy="1e-6" izz="1e-6" ixy="0" ixz="0" iyz="0"/>
</inertial>
</link>
<joint name="roll_joint" type="revolute">
<parent link="root"/>
<child link="roll_link"/>
<axis xyz="1 0 0"/>
<limit lower="-1.57" upper="1.57" effort="100" velocity="0.5"/>
<origin xyz="0 0 1.0" rpy="0 0 0"/>
</joint>
<joint name="pitch_joint" type="revolute">
<parent link="roll_link"/>
<child link="base_link"/>
<axis xyz="0 1 0"/>
<limit lower="-1.57" upper="1.57" effort="100" velocity="0.5"/>
<!-- 初始高度1m -->
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<!-- 车体 base_link -->
<link name="base_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="10.0"/>
<inertia ixx="${10.0*(body_wid*body_wid + body_hei*body_hei)/12.0}"
iyy="${10.0*(body_len*body_len + body_hei*body_hei)/12.0}"
izz="${10.0*(body_len*body_len + body_wid*body_wid)/12.0}"
ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="${body_len} ${body_wid} ${body_hei}"/>
</geometry>
<material name="gray"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="${body_len} ${body_wid} ${body_hei}"/>
</geometry>
</collision>
</link>
<gazebo reference="base_link">
<material>Gazebo/Grey</material>
<turnGravityOff>true</turnGravityOff>
<kinematic>false</kinematic>
<selfCollide>false</selfCollide>
</gazebo>
<!-- ====================== 新增车体坐标系连杆 ====================== -->
<!-- 固定关节:base_link -> vehicle_origin_link(你实际使用的车体坐标系) -->
<joint name="base_to_vehicle_origin" type="fixed">
<parent link="base_link"/>
<child link="vehicle_origin_link"/>
<!-- 安装在车体前端上方,可自行修改 x y z rpy -->
<origin xyz="${origin_x} ${origin_y} ${origin_z}" rpy="0 0 0"/>
</joint>
<link name="vehicle_origin_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.05"/>
<inertia ixx="${0.05*(0.1*0.1 + 0.1*0.1)/12.0}"
iyy="${0.05*(0.1*0.1 + 0.1*0.1)/12.0}"
izz="${0.05*(0.1*0.1 + 0.1*0.1)/12.0}"
ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="${origin_box_size}"/>
</geometry>
<material name="yellow"/>
</visual>
<!-- 关闭碰撞,仅做坐标系可视化参考,避免干扰碰撞检测 -->
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="${origin_box_size}"/>
</geometry>
</collision>
</link>
<gazebo reference="vehicle_origin_link">
<material>Gazebo/Yellow</material>
<turnGravityOff>true</turnGravityOff>
<selfCollide>false</selfCollide>
</gazebo>
<!-- ================================================================= -->
<!-- 倾角仪,安装在车体上,带一个小角度安装偏差 -->
<joint name="base_to_sensor" type="fixed">
<parent link="base_link"/>
<child link="sensor_link"/>
<origin xyz="0.5 0.6 ${body_hei/2.0 + sen_hei/2.0 + 0.1}" rpy="0.09 -0.04 0.03"/>
</joint>
<link name="sensor_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.1"/>
<inertia ixx="${0.1*(sen_wid*sen_wid + sen_hei*sen_hei)/12.0}"
iyy="${0.1*(sen_len*sen_len + sen_hei*sen_hei)/12.0}"
izz="${0.1*(sen_len*sen_len + sen_wid*sen_wid)/12.0}"
ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="${sen_len} ${sen_wid} ${sen_hei}"/>
</geometry>
<material name="dark"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="${sen_len} ${sen_wid} ${sen_hei}"/>
</geometry>
</collision>
</link>
<gazebo reference="sensor_link">
<material>Gazebo/Black</material>
<turnGravityOff>true</turnGravityOff>
<selfCollide>false</selfCollide>
</gazebo>
<!-- 三个固定标记点,位于车体上方 -->
<xacro:macro name="marker" params="name parent x y z color gazebo_color">
<joint name="base_to_${name}" type="fixed">
<parent link="${parent}"/>
<child link="${name}"/>
<origin xyz="${x} ${y} ${z}" rpy="0 0 0"/>
</joint>
<link name="${name}">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.01"/>
<inertia ixx="${0.01*0.4*marker_radius*marker_radius}"
iyy="${0.01*0.4*marker_radius*marker_radius}"
izz="${0.01*0.4*marker_radius*marker_radius}"
ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${marker_radius}"/>
</geometry>
<material name="${color}"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${marker_radius}"/>
</geometry>
</collision>
</link>
<gazebo reference="${name}">
<material>${gazebo_color}</material>
<turnGravityOff>true</turnGravityOff>
<selfCollide>false</selfCollide>
</gazebo>
</xacro:macro>
<!-- 前左、前右、后中,三点不共线 -->
<xacro:marker name="marker_1" parent="base_link"
x="0.2" y="0.8" z="1.14"
color="red" gazebo_color="Gazebo/Red"/>
<xacro:marker name="marker_2" parent="base_link"
x="0.2" y="-0.8" z="1.2"
color="green" gazebo_color="Gazebo/Green"/>
<xacro:marker name="marker_3" parent="base_link"
x="0.1" y="0.0" z="1.5"
color="blue" gazebo_color="Gazebo/Blue"/>
</robot>
原因
核心原因:欧拉角顺序问题 + 万向锁效应
URDF里的旋转层级是:root → 先绕X轴roll旋转 → roll_link → 再绕当前局部Y轴pitch旋转 → base_link
采用的是 RPY(XYZ 内在旋转,绕当前体轴),也就是航空常用的横滚-俯仰-偏航内在旋转顺序。
1. 为什么单独调一个角没问题,两个一起调就出现yaw?
- 只调
roll(X):只有绕X旋转,pitch、yaw一定=0,计算出来完全和你设置一致; - 只调
pitch(Y):只有绕Y旋转,roll、yaw一定=0; - 先roll、再pitch两个都旋转后,两次局部轴旋转复合之后,无法再只用纯粹的X、Y全局欧拉角描述,必然会产生等效的yaw分量。
通俗解释
- 第一次绕全局X转了
0.704rad,此时原来的Y轴已经被旋转偏移; - 第二次是绕旋转之后的局部Y轴转
0.620rad,不是最开始的全局Y轴; - 两次局部轴旋转叠加后的总姿态,解算成全局XYZ(固定轴)欧拉角时,就会拆出三个分量 roll/pitch/yaw,yaw不再是0。
你GUI设置的是两次分步局部轴旋转量,而你代码用 euler_from_quaternion 解出来的是全局固定坐标系下的XYZ欧拉角,二者定义维度不一样,所以数值不一致,还多出yaw。
2. 两种欧拉角的本质区别
① 你GUI设置的:内在旋转(Tait–Bryan,先X再Y,体轴)
R_total = R_Y(pitch) · R_X(roll)
先绕当前物体X转roll,再绕旋转后物体Y转pitch,只有两个输入角度。
② tf_transformations解出的:外在旋转(固定全局XYZ轴)
euler_from_quaternion 默认顺序 sxyz:绕世界固定X、Y、Z轴依次旋转得到当前姿态。
两个体轴旋转复合后的总姿态,映射到固定三轴上,就会出现三个角度,yaw自然不为0。
3. 为什么数值对不上(0.704,0.620 → 0.807,0.458,0.433)
- 你输入的是两次连续局部轴旋转的角度;
- 输出的是等价全局三轴固定旋转角度;
这两组欧拉角是同一姿态的两种不同表达方式,不是计算错误,只是描述规则不一样。
举个生活化例子:
你先侧身躺(roll),再抬头低头(pitch),这个姿态不能等价于单纯全局左右转+前后仰,一定会附带身体轻微偏转(等效yaw)。
4. 两种解决方式,按需选择
方式1:只读取你设置的原始关节角(最精准,不会出现yaw)
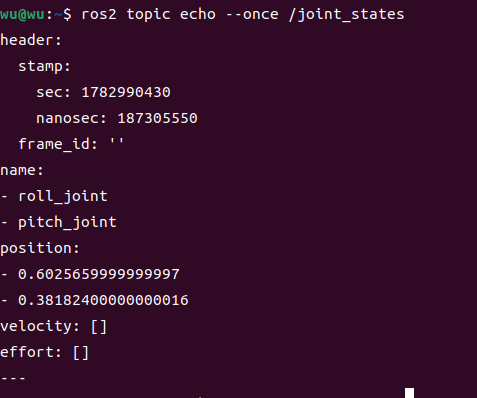
不要从TF四元数反解全局RPY,直接订阅 /joint_states 话题读取:roll_joint、pitch_joint 的原始角度,就是你GUI拖拽设置的0.704、0.620,永远不会出现yaw。
方式2:改用四元数/旋转矩阵描述姿态,放弃全局RPY
欧拉角本身有歧义、顺序依赖、万向锁缺陷,做标定推荐直接用四元数或旋转矩阵存储姿态,避免不同顺序带来的角度混淆。
方式3:如果一定要用欧拉角,必须保证旋转顺序一致
你是 X(roll) → Y(pitch) 内在旋转,不能用固定sxyz全局顺序解析,否则必然出现多余yaw。
补充:万向锁潜在风险
当pitch接近 ±90°时,X和Z轴会重合,roll和yaw会耦合,角度会出现跳变,这也是为什么多轴旋转场景工业上优先用四元数而不是欧拉角。
总结
- 不是代码/URDF错误,是欧拉角旋转定义(体轴vs固定轴、旋转顺序)不一致导致;
- GUI设置的是两步局部体轴旋转量,TF解出的是全局固定三轴等效欧拉角;
- 两个角度同时不为0时,等效yaw必然产生,属于正常数学现象;
- 想拿到你拖拽的原始rp值,直接读
/joint_states最准确。
ros2 topic echo --once /joint_states
这里的rp就是你gui里的rp。

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐

 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)