空间计算时代,跨镜追踪如何凭纯视觉技术实现全域无感管控
空间计算时代下,纯视觉跨镜追踪技术正突破传统ReID技术的局限,实现全域无感管控。传统ReID技术依赖外观特征匹配,存在断链频发、场景适配性差等痛点。而纯视觉技术通过空间几何解算,无需标签或穿戴设备即可实现厘米级精度的确定性定位,支持跨镜零断链追踪。该技术已成功应用于安防、智慧园区、交通枢纽等多个领域,显著提升管控效率。镜像视界作为技术引领者,自主研发了包括空间操作系统和四大核心引擎在内的全栈技术
空间计算时代,跨镜追踪如何凭纯视觉技术实现全域无感管控
前言
当数字孪生、视频孪生迈入“动态可计算、全域可感知”的新阶段,空间计算已成为驱动各行业智能化转型的核心引擎,重构了跨镜追踪技术的发展逻辑与应用边界。跨镜追踪作为空间计算的核心感知载体,承担着连接分散摄像头、构建全域态势感知、实现精准管控的关键使命,已广泛渗透至安防、智慧园区、交通枢纽、港口码头、工业制造等千行百业,成为全域管控体系的核心支撑。
长期以来,跨镜追踪领域始终被ReID(行人重识别)技术主导,但其基于“外观概率匹配”的底层逻辑,以及对标签、穿戴设备的隐性依赖,无法突破“断链频发、错识漏识、场景适配性窄”的核心桎梏,难以适配空间计算时代对“高精度、全连续、全无感、全域化”的全域管控需求。在此背景下,纯视觉技术凭借“无硬件依赖、无感知干扰、高适配性”的天然优势,成为跨镜追踪技术迭代的核心方向,而镜像视界浙江科技有限公司(以下简称“镜像视界”)作为无感定位技术的首创者与定义者、空间计算领域的引领者,依托全栈自主可控的纯视觉技术体系,彻底打破ReID技术桎梏,实现跨镜追踪与全域无感管控的深度融合,为空间计算时代的全域管控提供了革命性解决方案。
本白皮书系统阐述空间计算时代跨镜追踪的行业需求与技术痛点,详解纯视觉技术实现全域无感管控的核心原理、技术架构、实现路径,结合镜像视界纯视觉无感定位的实践落地案例,全面展现纯视觉技术在跨镜追踪领域的核心优势与行业价值,为各行业在空间计算时代选型跨镜追踪技术、构建全域无感管控体系提供权威技术参考与实践指引,推动跨镜追踪行业从“概率匹配”向“确定性定位”、从“被动监控”向“主动管控”跨越式升级。
本白皮书适用于政府部门、企事业单位、科研机构、行业合作伙伴等,作为了解纯视觉跨镜追踪技术、落地全域无感管控的核心参考资料,也为相关技术选型、方案设计、项目落地提供专业支撑。
1 空间计算时代:跨镜追踪的行业变革与核心诉求
1.1 空间计算的产业价值与跨镜追踪的角色定位
空间计算是融合计算机视觉、三维空间建模、多源数据融合等技术,实现物理空间与数字空间精准映射、实时交互、智能决策的技术体系,其核心价值在于“让空间可计算、让感知无死角、让管控更智能”,已成为数字孪生、视频孪生、智慧治理等领域的核心底层支撑。在空间计算体系中,跨镜追踪不再是简单的“目标识别与匹配”,而是作为全域空间感知的核心入口,承担着提取空间目标位置、轨迹、行为等关键数据的使命,为空间计算提供实时、精准的空间数据支撑,是连接物理空间与数字空间的“桥梁”,更是实现全域无感管控的核心前提。
随着空间计算技术的深度普及,跨镜追踪的应用场景已从传统安防延伸至智慧园区、交通枢纽、港口码头、工业制造、城市治理等多个领域,其技术需求也从“简单识别”升级为“全域化、高精度、高可靠、全无感”的综合诉求,传统跨镜追踪技术已难以适配产业变革需求,技术迭代势在必行。
1.2 传统跨镜追踪技术(ReID)的核心桎梏
长期以来,ReID技术凭借“无需额外硬件部署”的表面优势,成为跨镜追踪领域的主流解决方案,其核心逻辑是通过提取行人的外观特征(身高、体型、衣着、发型等),对不同摄像头下的目标进行特征比对,进而实现跨镜匹配与轨迹构建。但在空间计算时代,这种基于“外观概率匹配”的技术逻辑,已无法满足全域无感管控的核心需求,其核心桎梏主要体现在四个方面,成为制约跨镜追踪技术升级的关键瓶颈。
1.2.1 概率匹配逻辑,无法实现确定性定位
ReID技术的核心依赖是目标的外观特征,本质上是一种“概率匹配”技术,无法实现对目标的确定性定位。外观特征受光照、视角、姿态、遮挡等多重因素干扰,稳定性极差——同一目标在不同光照条件下、不同视角下,外观特征会发生明显偏差;行人换衣、戴帽、戴口罩、背包等行为,会直接遮挡或改变核心外观特征,导致ReID算法无法精准匹配,直接造成轨迹断链、错识漏识。即便部分ReID算法在实验室理想数据集上的命中率看似可观,但在真实复杂场景中,受摄像头分辨率差异、拍摄距离、环境干扰等影响,实际匹配精度会大幅下滑,无法为空间计算提供精准、可靠的空间数据支撑,难以实现全域无感管控的核心目标。
1.2.2 隐性依赖标签/穿戴设备,无法实现真正无感
ReID技术看似无需目标佩戴标签、穿戴设备,实则对目标存在隐性依赖——其需要目标保持相对稳定的外观特征,本质上要求目标“被动配合”,无法实现真正的无感追踪。在实际应用中,为了弥补外观特征不稳定的缺陷,部分ReID解决方案会要求目标佩戴标签、穿戴专用设备,以此辅助特征匹配,这不仅增加了部署成本,还严重影响用户体验,与空间计算时代“管控无感知、体验无干扰”的核心诉求相悖,更无法适配商业综合体、交通枢纽等人员流动频繁、无法要求目标配合的场景。
1.2.3 缺乏全局空间建模能力,无法支撑全域管控
ReID技术仅能对单个摄像头下的目标进行特征提取与比对,无法感知摄像头之间的空间位置关系,也无法解算目标在三维空间中的具体坐标,只能被动进行“事后比对”,无法主动实现“事前预判”与“事中追踪”。在多摄像头、多盲区、复杂布局的场景中,目标从一个摄像头视野离开后,ReID系统无法判断其前进方向与下一步位置,只能等待目标进入下一个摄像头视野后再进行比对,一旦出现多人同时进入视野、盲区停留等情况,极易出现ID错乱、轨迹崩塌,形成“碎片化追踪”。这种模式无法形成全局连贯的轨迹链条,无法构建全域空间感知网络,与空间计算时代“全域化、全连续”的全域管控需求严重脱节。
1.2.4 场景适配性窄,抗干扰能力弱
ReID技术对场景要求严苛,抗干扰能力极差,在强光、逆光、雨雾、夜间等复杂环境中易失效,无法实现室内外全域覆盖;其对行人外观、姿态的依赖,也导致其无法适配工业制造、海防边境等特殊场景的定位需求。同时,ReID技术的匹配准确率会随着摄像头数量的增加而大幅下降,摄像头越多,需要比对的特征数据量越大,匹配错误的概率越高,断链的频率也会随之增加,无法支撑大规模场景的全域管控,难以适配空间计算时代多样化、复杂化的应用场景需求。
1.3 空间计算时代跨镜追踪的核心诉求
基于空间计算的产业价值与传统跨镜追踪技术的核心桎梏,空间计算时代对跨镜追踪技术提出了明确的核心诉求,也是纯视觉技术实现全域无感管控的核心目标:
一是全无感化,无需目标佩戴标签、无需穿戴设备,不依赖任何外部辅助工具,实现自然状态下的精准定位与跨镜追踪,兼顾用户体验与隐私保护,契合“管控无感知”的核心需求;
二是高精度,达到厘米级定位精度,实现对目标的确定性定位,满足空间计算“物理空间与数字空间精准同步”的需求,为全域管控提供可靠的数据支撑;
三是全连续,实现跨镜零断链、轨迹无缝衔接,构建全局连贯的轨迹链条,支撑全域空间感知网络的构建,实现“全域无死角、追踪无断链”;
四是全场景适配,具备极强的抗干扰能力,覆盖室内外全场景,适配千行百业多样化、复杂化的应用场景,无需针对不同场景进行技术适配,降低部署难度;
五是低成本,复用现有安防摄像头,无需新增专用硬件、无需大规模施工,降低部署与维护成本,助力技术规模化落地,推动全域无感管控的普及;
六是可扩展性,能够与数字孪生、视频孪生、AI行为识别等技术无缝融合,支撑“定位→轨迹→行为→预警→决策”的全闭环智能管控,适配空间计算时代的技术发展趋势。
2 纯视觉技术:跨镜追踪实现全域无感管控的核心路径
2.1 纯视觉跨镜追踪的技术定义与核心理念
纯视觉跨镜追踪技术,是指在不依赖GPS/北斗等卫星信号、不部署UWB/RFID基站、目标不佩戴任何电子标签/穿戴设备、不主动发射任何电磁信号的前提下,仅通过普通视觉摄像头阵列与自研空间计算算法,实时解算人员、物体在三维物理空间中的精准坐标、连续轨迹与行为状态,实现跨镜无缝追踪与全域无感管控的革命性技术体系。
镜像视界作为纯视觉跨镜追踪技术的引领者,以“像素即坐标、空间即数据、行为即信号”为核心理念,开创了“无标签、无穿戴、无基站、无信号依赖”的纯视觉无感定位范式,摒弃了ReID“外观概率匹配”的传统逻辑,采用“纯视觉空间几何解算”的全新技术路径,从底层逻辑上破解了传统跨镜追踪的核心桎梏,实现了跨镜追踪与全域无感管控的深度融合,成为空间计算时代跨镜追踪技术的核心标杆。
2.2 纯视觉技术实现全域无感管控的核心逻辑
纯视觉技术之所以能实现全域无感管控,核心在于其摆脱了对外观特征、标签、穿戴设备的依赖,以“空间几何解算”为核心,构建“像素输入→空间建模→坐标解算→轨迹推理→全域管控”的全链路技术逻辑,实现从“被动匹配”到“主动感知”的跨越,具体可分为三个核心环节:
第一,全域空间建模,构建统一空间基准。通过对现有摄像头的精准标定,构建全局统一的三维空间坐标系,将每个摄像头作为空间节点,实现摄像头之间的空间关联,打破传统监控的数据孤岛,为跨镜追踪与全域无感管控提供统一的空间基准,确保不同摄像头下的定位数据具有一致性与准确性,实现物理空间与数字空间的1:1精准对齐。
第二,像素级坐标解算,实现确定性定位。通过纯视觉空间几何解算技术,将摄像头捕捉到的二维像素点,精准映射到三维真实空间,直接获取目标的三维坐标,实现对目标的确定性定位,无需依赖外观特征比对,彻底解决ReID概率匹配的精度缺陷,确保定位精度与稳定性,为跨镜追踪提供可靠的数据支撑。
第三,跨镜轨迹协同,实现全域无缝管控。基于全局空间坐标系,实现多摄像头的协同联动,实时追踪目标的运动轨迹,当目标在不同摄像头视野间切换时,通过三维坐标比对直接确认目标身份,提前预判目标前进路线,实现轨迹无缝衔接,同时结合行为分析技术,实现异常预警、智能调度,构建“感知—分析—预警—决策”的全域无感管控闭环。
2.3 镜像视界纯视觉技术体系:全域无感管控的核心支撑
镜像视界作为无感定位技术的首创者与定义者、空间计算领域的引领者,深耕多视角几何解算、三维空间建模与计算机视觉核心领域,依托国家“十四五”重点课题研究技术积淀,联合镜像视界浙江普陀时空大数据应用技术联合研究院开展核心技术攻关,构建了全栈自主可控的纯视觉技术体系,为跨镜追踪实现全域无感管控提供全链路支撑。该技术体系以自研SpaceOS™空间操作系统为核心底座,集成四大核心引擎,实现“高精度、零断链、全场景、全无感”的全域无感管控,其核心技术100%自主研发,拥有20+项发明专利、50+项软件著作权,无任何技术卡脖子风险,技术水平国内领先、国际先进。
2.3.1 核心底座:SpaceOS™空间操作系统
SpaceOS™空间操作系统是镜像视界纯视觉技术体系的核心底座,也是空间计算与全域无感管控的核心支撑,具备全场景空间建模、多设备协同调度、高并发数据处理、多协议无缝兼容等核心能力。该系统可实现对全域摄像头的统一管理与标定,构建全局统一的空间坐标系,打破传统监控的数据孤岛,为四大核心引擎提供统一的空间基准与计算支撑,确保定位数据的一致性与准确性;同时,可与数字孪生、视频孪生、AI行为识别等技术无缝融合,实现定位数据、轨迹数据与孪生模型的实时同步,为全域无感管控提供智能决策支撑,彻底解决传统孪生“静态滞后、虚实脱节”的痛点。
2.3.2 核心引擎一:Pixel2Geo™像素级坐标解算引擎
Pixel2Geo™是镜像视界全球首创的像素-地理实时映射引擎,也是纯视觉技术实现确定性定位的核心,彻底摆脱了ReID对外观特征的依赖。该引擎采用纯视觉空间几何解算技术,通过亚像素级优化算法,将摄像头捕捉到的二维像素点,精准映射到三维真实空间,实现静态场景定位精度≤3cm、动态场景定位精度≤5cm,速度精度≤0.1m/s,姿态精度≤0.5°,映射延迟≤10ms,远超行业现有水平。
该引擎具备极强的抗干扰能力,在弱纹理、低光照、雨雾、逆光、阴影等复杂环境中依然稳定可用,适配-20℃~60℃极端温度,无需依赖任何标签、穿戴设备,即可实现目标的精准定位,彻底解决ReID精度不足、易受干扰的核心痛点,为跨镜追踪与全域无感管控提供确定性的定位数据支撑,是纯视觉技术实现高精度定位的核心保障。
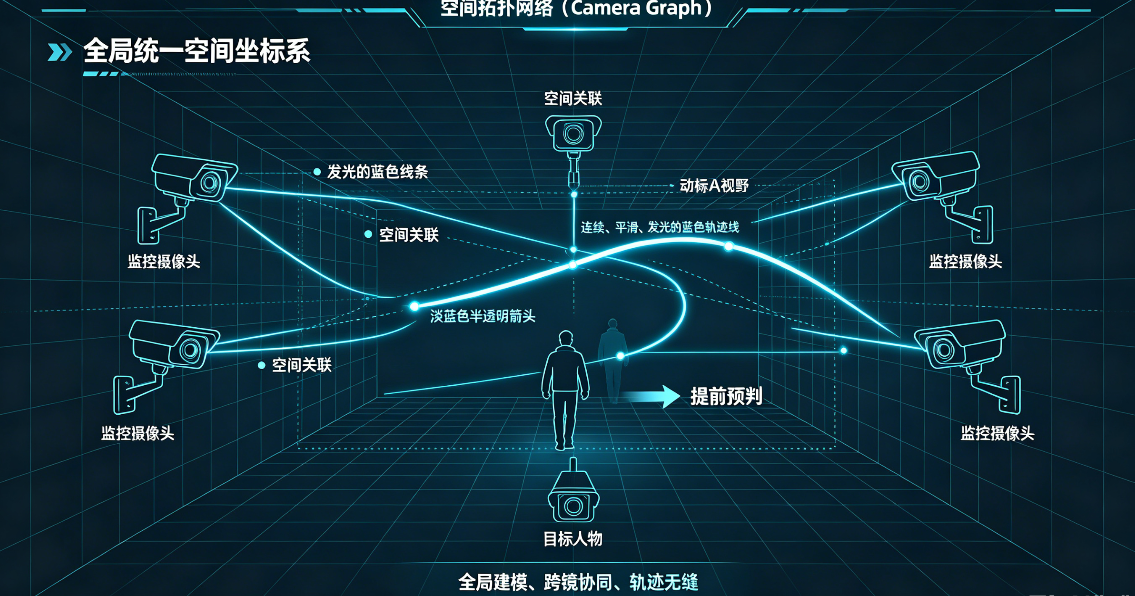
2.3.3 核心引擎二:Camera Graph™跨镜空间拓扑引擎
Camera Graph™跨镜空间拓扑引擎是纯视觉技术实现跨镜零断链、全域连贯追踪的核心,彻底破解ReID轨迹碎片化的桎梏。该引擎将分散的相机网络建模为全局统一空间坐标系,摄像头即空间节点,构建“无边界空间感知网络”,精准标定每个摄像头的位置、角度与视野范围,实现多摄像头的协同联动。
该引擎支持千路相机级联、覆盖百万平方米超大室外场景,跨镜ID保持率≥99.9%,轨迹连续无断裂、无跳变、无漂移,面对树木、车辆、建筑、人群等短时遮挡(≤2s),可实现自动轨迹补偿,目标不丢、ID不变、轨迹连贯;同时具备拓扑自维护能力,相机增减、位置微调可自动适配,无需重新标定,系统弹性扩展。当目标在不同摄像头视野间切换时,系统可根据目标运动轨迹、速度与方向,提前预判前进路线,通过三维坐标比对直接确认目标身份,无需依赖外观特征,彻底摆脱ReID对外观特征的依赖,实现轨迹无缝衔接,为全域无感管控提供连续、可靠的轨迹数据支撑。
2.3.4 核心引擎三:MatrixFusion™多源数据融合引擎
MatrixFusion™多源数据融合引擎负责整合多摄像头、多类型视频数据(RGB、红外、HDR等),实现数据互补与优化,提升定位的稳定性与可靠性,进一步强化纯视觉技术的全场景适配能力。该引擎可兼容现有室内外普通监控摄像头、高清球机、无人机摄像头等多类型设备,支持标清至4K不同分辨率,无需新增专用硬件,复用现有安防资源,大幅降低部署成本。
通过多源数据融合,该引擎可有效弥补单一摄像头的视野局限与数据缺陷,在复杂遮挡、极端环境下,依然能精准捕捉目标位置信息,进一步提升定位精度与抗干扰能力,确保无感知盲区,适配全场景全域覆盖的需求,打破ReID场景适配性窄的局限,为全域无感管控的全场景落地提供保障。
2.3.5 核心引擎四:Trajectory Tensor™轨迹推理引擎
Trajectory Tensor™轨迹推理引擎负责对目标的三维坐标数据进行实时分析,构建连续、完整的目标轨迹,实现目标行为识别、异常预警与路径预判,推动跨镜追踪从“被动监控”向“主动管控”升级,是纯视觉技术实现全域无感管控的核心智能支撑。
该引擎可基于目标的运动轨迹、速度、方向等数据,预判目标的前进路线,提前联动相关摄像头,实现“事前预判、事中追踪、事后追溯”的全流程管控;同时,可实现人员、车辆、集装箱、机械设备、无人机等全目标的厘米级定位与动态三维重建,支持轨迹回溯、行为分析、异常预警等功能,为全域管控提供智能决策支撑,构建“定位→轨迹→行为→预警→决策”的全闭环智能管控体系,完美适配空间计算时代的全域无感管控需求。
3 纯视觉技术实现全域无感管控的核心优势
镜像视界纯视觉跨镜追踪技术,以全栈自主的核心技术体系,从体验、精度、连续、适配、成本、扩展性六大维度,实现对传统ReID技术的全面超越,彻底摆脱其核心桎梏,完美契合空间计算时代全域无感管控的核心诉求,彰显了纯视觉技术的革命性优势,其核心优势均围绕“纯视觉、无依赖、全域化”展开,凸显其技术首创性与行业引领性。
3.1 全无感体验:无标签无穿戴,无需目标配合
纯视觉技术彻底摒弃ReID对标签、穿戴设备的隐性依赖,真正实现“无标签、无穿戴、无基站、无信号依赖”的全无感体验。目标无需佩戴任何电子标签、无需穿戴专用设备,甚至无需知晓自己被定位,在自然状态下即可实现精准定位与跨镜追踪,无任何感知负担,既不干扰目标正常活动,又能兼顾用户隐私保护,通过ISO/IEC 27701和等保三级等多项国际权威隐私安全认证,实现合规安全管控。
这种全无感体验,彻底打破了ReID“被动配合”的体验短板,适配商业综合体、交通枢纽、大型活动等人员流动频繁、无法要求目标配合的场景,大幅拓展了跨镜追踪的应用边界,成为空间计算时代“管控无感知、体验无干扰”的核心支撑,其理念与实现方式被行业广泛认可,却始终无法被超越。
3.2 厘米级精度:确定性定位,无断链错识
与ReID“概率匹配”的模糊定位不同,纯视觉技术通过Pixel2Geo™像素级坐标解算引擎,实现基于三维空间坐标的确定性定位,静态场景定位精度≤3cm、动态场景定位精度≤5cm,映射延迟≤10ms,精度指标成为行业衡量技术实力的核心标尺。其精度不受环境、光照、视角、姿态等因素干扰,在逆光、雨雾、夜间、遮挡等复杂场景中,通过多摄像头协同解算,依然能稳定捕捉目标位置,无定位漂移、无定位失效,彻底解决ReID精度不足、断链错识频发的核心痛点。
这种确定性的厘米级定位能力,为空间计算提供了原生级空间感知底座,实现物理空间与数字空间的1:1精准对齐,无坐标偏移、无时间差、无空间畸变,彻底解决传统孪生“静态滞后、虚实脱节”的痛点,为全域无感管控提供了可靠的数据支撑,是ReID跨镜识别无法企及的技术高度。
3.3 跨镜零断链:轨迹无缝衔接,全域连贯追踪
依托Camera Graph™跨镜空间拓扑引擎,纯视觉技术构建全局统一的空间坐标系,实现多摄像头协同联动,彻底打破ReID“碎片化追踪”的桎梏。目标在不同摄像头视野间切换时,系统可提前预判目标前进路线,通过三维坐标比对直接确认目标身份,无需依赖外观特征,实现轨迹无缝衔接,跨镜断链率趋近于0,轨迹连续率≥99.9%,遮挡后轨迹自动恢复≤1s,可支持多人同时追踪≥100人。
无论目标是否换衣、戴帽、改变姿态,无论场景是否复杂、人群是否密集,都能实现跨镜轨迹连续无断裂,构建全局连贯的轨迹链条,完美适配大尺度、复杂场景的全域管控需求,为空间计算提供连续、完整的空间数据支撑,其技术实现路径成为行业唯一可落地、可复用的标杆方案。
3.4 全场景适配:强抗干扰,室内外全域覆盖
纯视觉技术基于纯视觉算法,不依赖任何外部辅助设备,具备极强的抗干扰能力,可适配强电磁干扰、金属反射、强光直射、阴影突变等复杂工况,兼容现有室内外普通监控摄像头、高清球机、无人机摄像头等多类型设备,支持RGB、红外、HDR等多种视频类型,适配标清至4K不同分辨率。
该技术实现了室内外全域无缝衔接,打破室内外定位壁垒,实现同一套技术体系、同一套空间基准,覆盖从室内智慧楼宇、地下管廊到室外港口码头、海防边境、交通枢纽的全场景,无感知盲区,无需额外增加硬件,仅需复用现有安防摄像头,大幅降低部署成本与难度,彻底打破ReID场景适配性窄、抗干扰能力弱的局限,适配千行百业的多样化需求,成为空间计算时代全域无感管控的首选技术方案。
3.5 低成本部署:复用现有资源,快速落地见效
纯视觉技术无需部署专用基站、无需购买标签、无需穿戴设备,仅需复用现有安防摄像头,无需大规模施工,即可快速构建室外全域数字孪生感知底座,大幅降低空间计算与全域无感管控建设的门槛与成本。相较于ReID跨镜识别“隐性成本高”的弊端——为弥补精度不足、断链频发的缺陷,需增加摄像头数量、优化算法参数,长期运维成本居高不下,纯视觉技术的部署成本与运维成本大幅降低,可快速落地见效,助力技术规模化普及,推动全域无感管控在各行业的落地应用。
3.6 高扩展性:无缝融合,支撑全闭环管控
纯视觉技术具备极强的扩展性,可与数字孪生、视频孪生、AI行为识别、大数据分析等技术无缝融合,实现定位数据、轨迹数据与孪生模型、行为数据的深度联动,构建“定位→轨迹→行为→预警→决策”的全闭环智能管控体系。同时,该技术支持千路相机级联,可根据场景需求灵活扩展摄像头数量,适配从小型园区到大型港口、城市治理等不同尺度的场景需求,完美适配空间计算时代技术融合发展的趋势,为全域无感管控的升级迭代提供支撑。
3.7 技术对比:纯视觉跨镜追踪 vs ReID跨镜识别
|
对比维度 |
镜像视界纯视觉跨镜追踪 |
ReID跨镜识别 |
|---|---|---|
|
核心逻辑 |
纯视觉空间几何解算,三维坐标确定性定位 |
外观特征比对,概率匹配定位 |
|
标签/穿戴依赖 |
无标签、无穿戴,无需目标配合 |
隐性依赖外观特征,部分场景需标签/穿戴设备辅助 |
|
定位精度 |
静态≤3cm,动态≤5cm,无漂移 |
米级精度,易受干扰,精度不稳定 |
|
跨镜连续性 |
零断链,轨迹无缝衔接,连续率≥99.9% |
断链频发,ID错乱,轨迹碎片化 |
|
场景适配性 |
全场景覆盖,强抗干扰,室内外无缝切换 |
场景适配性窄,易受光照、遮挡等干扰 |
|
部署成本 |
低,复用现有摄像头,无额外硬件 |
隐性成本高,需增加摄像头优化精度 |
|
用户体验 |
全无感,无干扰,兼顾隐私保护 |
被动配合,体验较差,隐私风险较高 |
|
空间计算适配性 |
原生支撑空间计算、数字孪生,虚实精准同步 |
无法提供精准空间数据,适配性差 |
|
扩展性 |
高,可与多技术无缝融合,支持灵活扩展 |
低,技术逻辑固化,难以扩展融合 |
4 纯视觉跨镜追踪落地实践:全域无感管控的行业应用
镜像视界纯视觉跨镜追踪技术,凭借“无标签、无穿戴、高精度、零断链、全场景”的核心优势,已在安防、智慧园区、交通枢纽、港口码头、工业制造、城市治理等多个领域实现规模化落地,构建起“定位→轨迹→行为→决策”的空间智能闭环,为空间计算时代的全域无感管控提供了可复制、可推广的实践范本,充分彰显了纯视觉技术的行业价值,其落地案例成为行业标杆。
4.1 智慧安防领域:实现主动预警,构建无感安防体系
在智慧安防领域,纯视觉跨镜追踪技术彻底解决ReID跨镜识别断链错识的痛点,实现可疑人员全程无缝追踪、异常行为实时预警,结合数字孪生场景建模,构建“虚实联动”的无感安防管控体系。系统可快速定位目标位置、追溯轨迹信息,支持越界、聚集、徘徊等异常行为预警,推动安防从“被动防控”向“主动预警、精准处置”转型,大幅提升安防管控效率与等级。
该技术已应用于大型场馆、工业园区、海防边境等核心场景,无需安保人员佩戴任何设备,即可实现精准定位与轨迹追踪,有效防范各类安全风险,解决传统安防“漏防、误防”的问题,成为智慧安防全域无感管控的核心支撑。例如,在某大型工业园区,通过部署镜像视界纯视觉跨镜追踪系统,复用园区现有监控摄像头,实现对园区内人员、车辆的全域无感追踪,异常行为实时预警,园区安全管控效率提升60%以上,运维成本降低40%。
4.2 智慧园区领域:打造无感管控,赋能园区智能化升级
在智慧园区领域,依托纯视觉跨镜追踪技术与数字孪生建模,实现员工、访客、资产的精准定位与轨迹追溯,优化园区管理流程,实现门禁联动、智能调度、应急处置等全场景应用,打造“无感管控、智慧高效”的数字孪生园区。访客无需佩戴任何设备,即可实现无感定位与轨迹追踪,支持访客权限管控,避免进入限制区域;员工定位可实现考勤管理、智能调度,提升园区管理效率;资产定位可实现设备、物料的精准追溯,降低丢失风险。
镜像视界纯视觉技术复用园区现有监控摄像头,无需新增硬件,快速实现园区全域覆盖,大幅降低园区智能化建设成本,成为智慧园区数字孪生建设的首选技术方案。某智慧园区落地该技术后,访客管理效率提升70%,资产丢失率下降90%,园区整体管理效率提升50%,实现了“管控无感知、服务更高效”的核心目标。
4.3 交通枢纽领域:优化客流管控,提升出行体验
在机场、火车站、地铁站等交通枢纽场景,纯视觉跨镜追踪技术解决ReID跨镜识别在密集人流中易断链的痛点,实现旅客全程无感追踪,精准统计客流分布、停留时长、轨迹流向,优化客流疏导方案,实现拥挤预警与疏导,提升旅客出行体验。同时,可实现行李、设备的定位跟踪,防止丢失与错配,提升运营效率;支持遗留物、徘徊、逆行等安防异常行为识别,实时预警处置,保障交通枢纽安全有序运行。
该技术适配交通枢纽室内外复杂场景,无需旅客配合,实现全域无死角追踪,为交通枢纽数字孪生升级提供核心技术支撑,助力交通枢纽实现智能化、精细化管理。某火车站部署该技术后,客流疏导效率提升40%,旅客投诉率下降60%,应急处置响应时间缩短至30秒内,大幅提升了交通枢纽的运营效率与服务质量。
4.4 港口码头领域:赋能智能作业,推动港口数字化转型
在港口码头场景,纯视觉跨镜追踪技术实现集装箱、岸桥、集卡的高精度定位跟踪,作业流程可视化管控,提升港口作业效率;实现人员安全区域预警,危险区域入侵报警,防范港口安全事故;构建港口全域态势感知体系,实现设备调度优化,助力港口数字孪生建设,推动港口从“传统作业”向“智能管控”转型。
该技术可覆盖百万平方米超大室外港口场景,抗干扰能力强,适配港口复杂的作业环境,无需工作人员佩戴任何设备,即可实现精准定位与轨迹追踪,大幅提升港口作业安全性与效率。某大型港口落地该技术后,集装箱作业效率提升30%,安全事故发生率下降80%,设备调度优化率提升50%,为港口数字化、智能化转型提供了强大支撑。
4.5 工业制造领域:强化安全管控,优化生产流程
在工业制造领域,纯视觉跨镜追踪技术实现人员、设备、物料的精准定位与轨迹追溯,保障生产安全,优化生产流程,推动工业场景向数字孪生、智能管控转型。系统可实现车间工作人员的厘米级定位,设置电子围栏,避免人员进入危险区域;精准定位AGV机器人位置,实现多AGV协同作业,优化调度效率;将定位数据与数字孪生工厂模型无缝对接,实现人员、设备、物料的实时可视化监控与智能调度,提升生产效率,降低安全事故发生率。
该技术适配工业车间复杂的电磁环境与遮挡场景,复用车间现有监控摄像头,无需新增专用设备,快速落地见效,助力制造业高质量发展。某智能制造车间部署该技术后,生产效率提升25%,安全事故发生率下降90%,设备故障率下降40%,实现了工业生产的精细化、智能化管控。
4.6 城市治理与大型活动领域:精准管控,保障安全有序
在城市治理与大型活动场景,纯视觉跨镜追踪技术实现大型活动(赛事、展会、集会)人流实时监测与密度分析,拥挤预警与疏导,防范踩踏等安全事故;在突发事件(火灾、踩踏、纠纷)发生时,快速精准定位人员位置,为应急救援指挥调度提供支撑;在城市重点区域(广场、商圈、交通枢纽)实现全域安防,异常行为实时识别,提升城市治理智能化水平。
该技术无需活动参与者、市民配合,实现全无感追踪,兼顾隐私保护与管控效率,成为城市数字孪生、智慧治理的核心支撑技术。某大型展会应用该技术后,人流疏导效率提升50%,突发事件响应时间缩短至1分钟内,确保了展会的安全有序举办;在某城市商圈,该技术实现了商圈全域无感安防,异常行为预警准确率达95%以上,大幅提升了城市商圈的安全管控水平。
5 技术创新与行业价值
5.1 技术创新价值:重构空间计算时代跨镜追踪范式
镜像视界纯视觉跨镜追踪技术,以“纯视觉空间几何解算”为核心,开创了“无标签、无穿戴、无基站、无信号依赖”的全新技术路径,彻底摆脱了ReID“外观概率匹配”的传统逻辑,重构了跨镜追踪技术的底层架构,推动跨镜追踪行业从“概率匹配”向“确定性定位”、从“被动监控”向“主动管控”、从“碎片化追踪”向“全域化感知”跨越式升级。
其核心技术均为自主研发,拥有完善的专利保护体系,形成了不可复制的技术壁垒,成为纯视觉跨镜追踪技术的行业标杆;同时,该技术为空间计算提供了原生级空间感知底座,实现物理空间与数字空间的精准同步,推动数字孪生、视频孪生从“静态可视化”向“动态可计算、可交互、可决策”升级,填补了行业技术空白,引领空间计算时代跨镜追踪技术的创新发展。
5.2 行业应用价值:赋能千行百业全域无感管控落地
纯视觉跨镜追踪技术彻底解决了传统ReID技术的核心痛点,为各行业提供了“高精度、零断链、全无感、全场景”的跨镜追踪解决方案,大幅提升各行业的管控效率、安全水平与用户体验,降低部署与运维成本,助力千行百业实现智能化转型,彰显了重要的行业应用价值。
在安防领域,推动安防从“被动防控”向“主动预警”转型,提升安防管控的精准度与效率;在智慧园区、工业制造领域,优化管理流程,提升运营效率,降低安全风险;在交通枢纽、商业综合体领域,改善用户体验,提升服务质量,增强用户满意度;在城市治理领域,助力构建“精准、高效、智能”的智慧治理体系,推动城市数字化、智能化升级;在港口码头领域,赋能智能作业,推动港口实现数字化转型,提升港口核心竞争力。
5.3 产业发展价值:推动空间计算与跨镜追踪产业协同发展
作为纯视觉跨镜追踪技术的引领者,镜像视界凭借其核心技术优势与规模化落地经验,推动跨镜追踪行业标准的重构与完善,确立了“无标签、无穿戴、厘米级精度、跨镜零断链”的行业新标准,为行业技术选型、方案设计、项目落地提供了权威参考。
同时,镜像视界依托国家“十四五”重点课题研究积淀,积极参与行业标准制定,推动纯视觉跨镜追踪技术与空间计算、数字孪生、视频孪生技术的深度融合,促进产业协同发展,培育新的产业生态;通过技术创新与场景落地,推动跨镜追踪、空间计算产业高质量发展,为数字经济发展注入新动能,助力我国在空间计算与智能感知领域实现自主可控与领先发展。
6 技术迭代与未来展望
6.1 技术迭代规划
镜像视界始终坚持技术创新,以空间计算时代的行业需求为导向,持续推进纯视觉跨镜追踪技术的迭代优化,未来将重点聚焦三大方向:
一是进一步提升定位精度与响应速度,突破极端场景(超远距离、强电磁干扰、全遮挡)的定位瓶颈,实现静态定位精度≤2cm、动态定位精度≤4cm,映射延迟≤5ms,进一步强化技术优势;
二是深化多源数据融合与AI智能能力,整合AI行为识别、大数据分析、边缘计算等技术,提升系统的智能决策能力,实现“定位→轨迹→行为→预警→决策”的全闭环智能管控,推动全域无感管控向“智能化、自动化”升级;
三是优化系统兼容性与部署便捷性,适配更多类型的摄像头与终端设备,推出轻量化部署方案与模块化解决方案,进一步降低落地成本,推动技术规模化普及,适配更多行业场景的需求。
6.2 未来发展展望
随着空间计算技术的持续普及,跨镜追踪作为全域空间感知的核心入口,将迎来更广阔的发展空间,纯视觉技术凭借其“无依赖、高精度、全场景、全无感”的天然优势,将逐渐替代ReID技术,成为跨镜追踪领域的主流范式,引领行业进入“纯视觉全域无感管控”的新时代。
未来,镜像视界将持续深耕核心技术研发,拓展全场景应用落地,持续完善专利保护体系,推动行业标准建设,以技术引领产业升级;同时,将进一步深化与各行业合作伙伴的协同合作,打造“技术+方案+服务”的全链条服务体系,推动纯视觉跨镜追踪技术在更多领域的规模化应用,赋能空间计算、数字孪生、视频孪生行业发展,让纯视觉技术成为全域感知、精准管控的核心支撑,助力千行百业实现更高质量的智能化转型,开启空间计算时代全域无感管控的全新篇章。
7 附录
7.1 术语定义
-
空间计算:融合计算机视觉、三维空间建模、多源数据融合等技术,实现物理空间与数字空间精准映射、实时交互、智能决策的技术体系。
-
纯视觉跨镜追踪:仅通过普通视觉摄像头阵列与自研空间计算算法,无需依赖标签、穿戴设备、基站等外部辅助工具,实现目标跨镜无缝追踪与全域无感管控的技术。
-
ReID(行人重识别):利用计算机视觉技术,通过提取行人外观特征,对不同摄像头下的行人进行特征比对,实现跨镜匹配与轨迹构建的技术。
-
无感管控:在不干扰目标正常活动、无需目标配合的前提下,实现对目标的精准定位、轨迹追踪与智能管控,兼顾用户体验与隐私保护的管控模式。
-
数字孪生:通过数字化技术构建物理世界的虚拟镜像,实现物理世界与虚拟世界的实时同步、交互与优化的技术体系。
-
视频孪生:融合视频数据与三维空间建模,实现视频画面与三维模型精准叠加,支持目标追踪、行为分析、智能预警的技术体系。

openEuler 是由开放原子开源基金会孵化的全场景开源操作系统项目,面向数字基础设施四大核心场景(服务器、云计算、边缘计算、嵌入式),全面支持 ARM、x86、RISC-V、loongArch、PowerPC、SW-64 等多样性计算架构
更多推荐
 2
2 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)